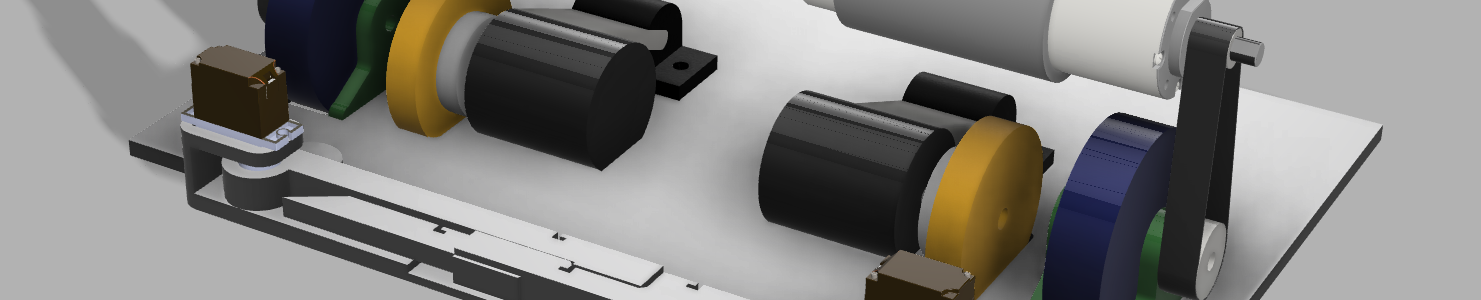
Eurobot Junior: Working on the SIMAs
In the past two weeks, we have made significant progress. We have designed the last three SIMAs and ordered all necessary items. This progress will enable us to complete mass production and begin testing by next week. We are also looking forward to implementing dynamic point estimation using wireless modules. … Weiterlesen …