
This week we started to think about the hardware. We first focused on the gripper arm for the plants. At first we wanted to grab the plants from the side, but now we have decided to grab them from above due to the unfavorable position of the plants on the playing field. To do this, we have a kind of „shovel“ at the front to pick up the plants, which is movable and brings them into a shape so that we can grab them. Take a look!
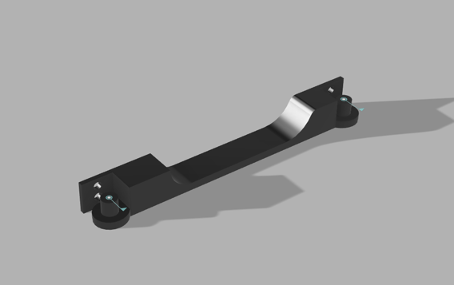
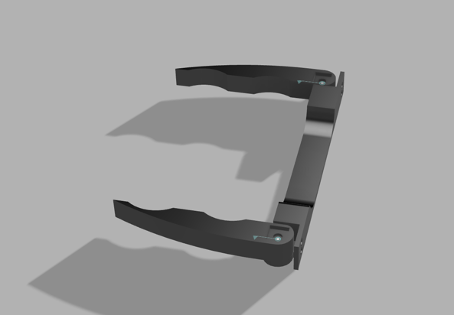
The second part is a gripper arm that comes from above and can grab all six plants from above. We hope to be able to present a prototype of the „shovel“ as early as next week. While we are developing the hardware, we are also developing the software. We are currently working on using Navstack with our bot and are debugging it. We will link Navstack with our lidar and then test our enemy detection, that’s the plan for the software next week.