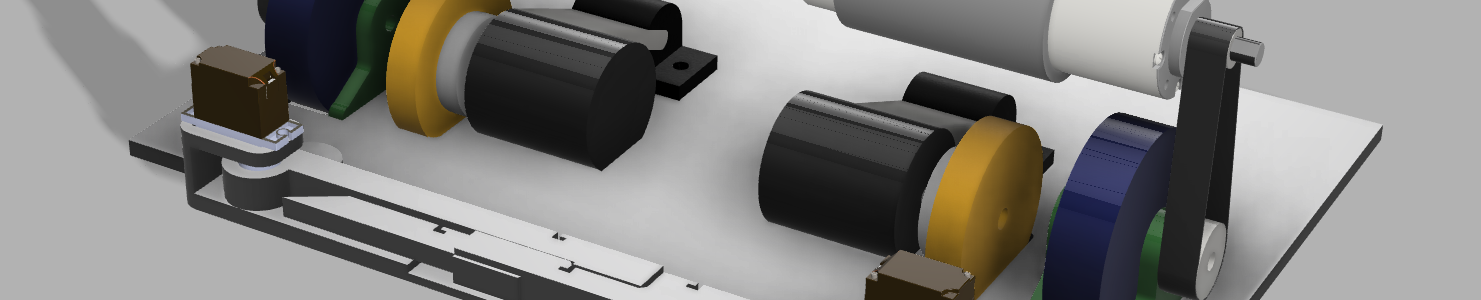
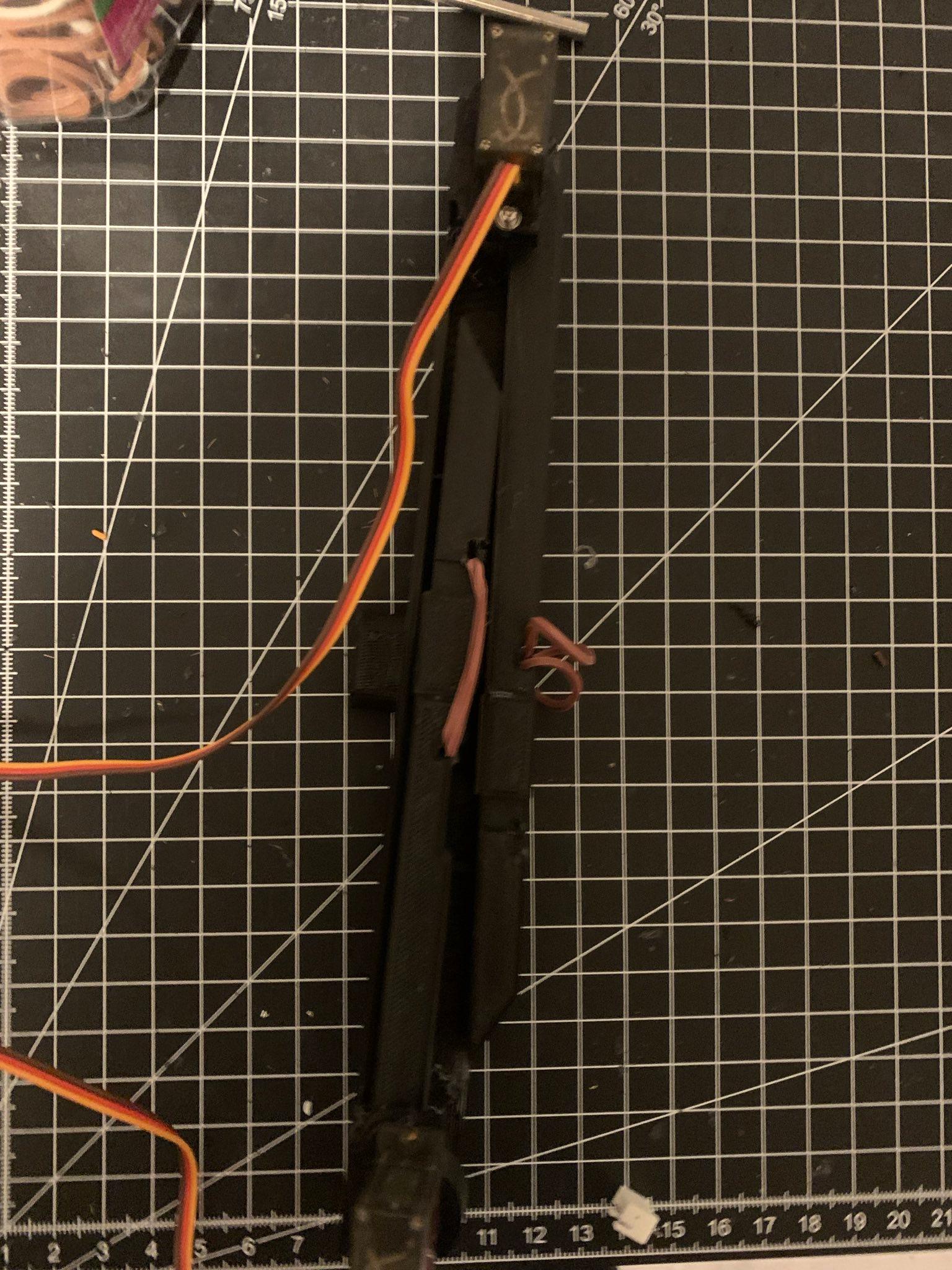
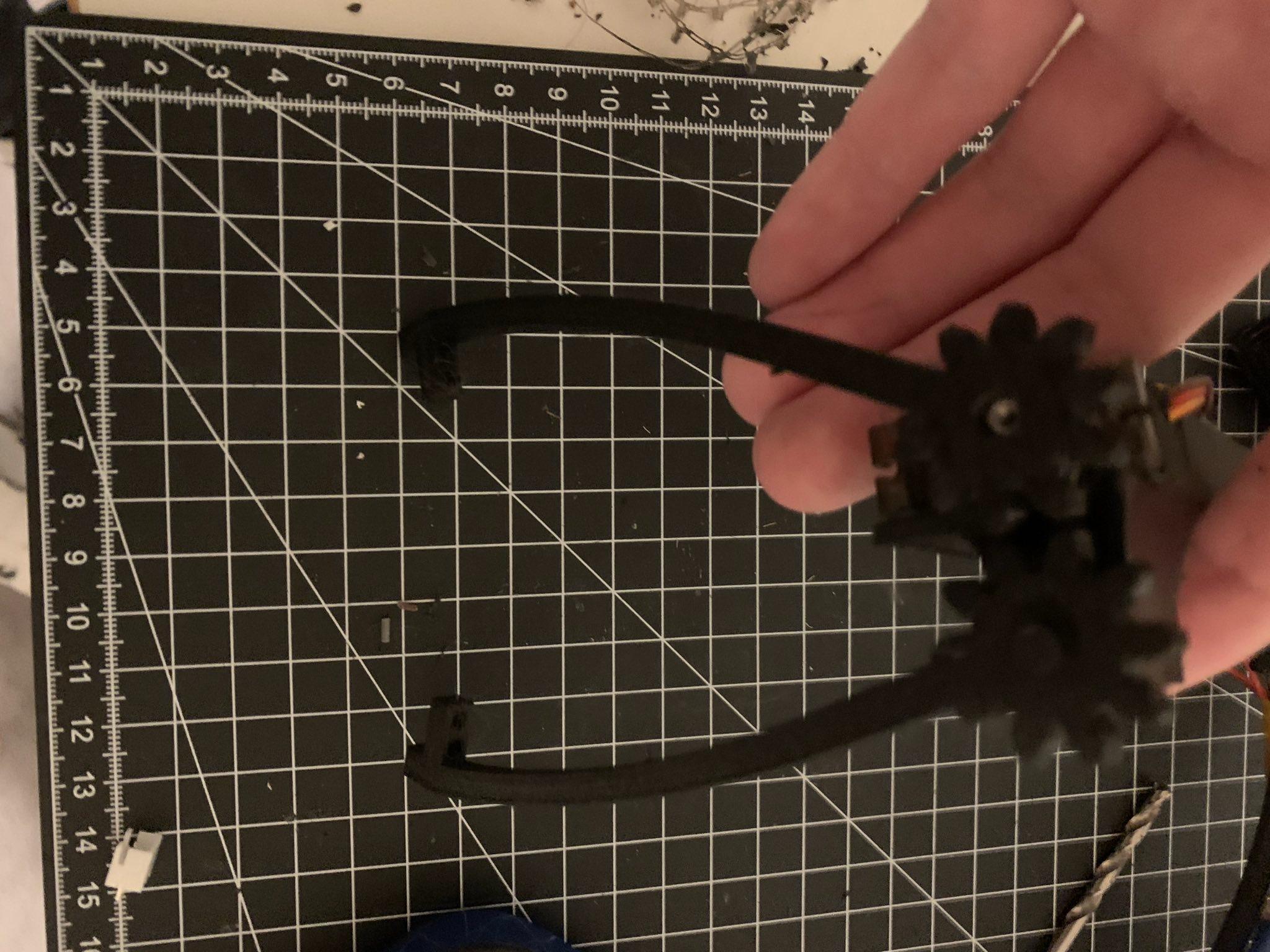
We have spent the last two weeks developing our gripping system and working on our ROS alternative. We have now written our own script to get the lidar data into our own map. At the moment we are also working on getting the current position data from the robot into this map in order to be able to control the robot with lidar data. In terms of hardware, we have spent the last two weeks developing the grapper and gripper. We can now use these to automatically shape the plants and then lift them. Our plan is then to drive the robot to the conveyor belt and place the plants in the planter. Pictures of the grapper and gripper can be seen below: We have also started to build a driving base with belt-drive, we plan to install the gripping system on this next week.
(author: Christoph)