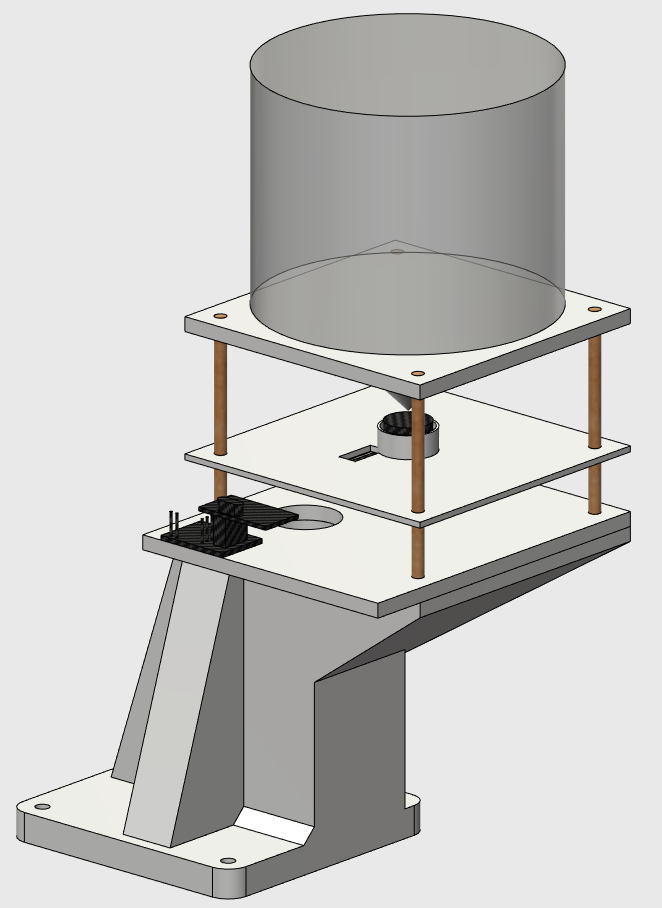
We made several test runs with a self-made beacon system. The system is based on ultrasound and radio frequency. It would involve 3 towers for trilateration and a receiver on top of our robot. First test results seem to be very promising.

Robotik-AG des Gymnasiums Markt Indersdorf
We made several test runs with a self-made beacon system. The system is based on ultrasound and radio frequency. It would involve 3 towers for trilateration and a receiver on top of our robot. First test results seem to be very promising.