Our first approach to collect the balls was a tube-shaped object. The balls would be accelerated by a hair-dryer and…. Yes, we noticed it. The tube was too big for the contest, the hair-dryer was a stupid idea. And it didn’t work at all. 🙁 But at least we tried. 😉
So our hardware team came up with something completely new: A revolver-shaped ball-catcher and a cannon similar to a ballista. 🙂 This decision resulted in a complete overhaul of the robot design. Take a look:
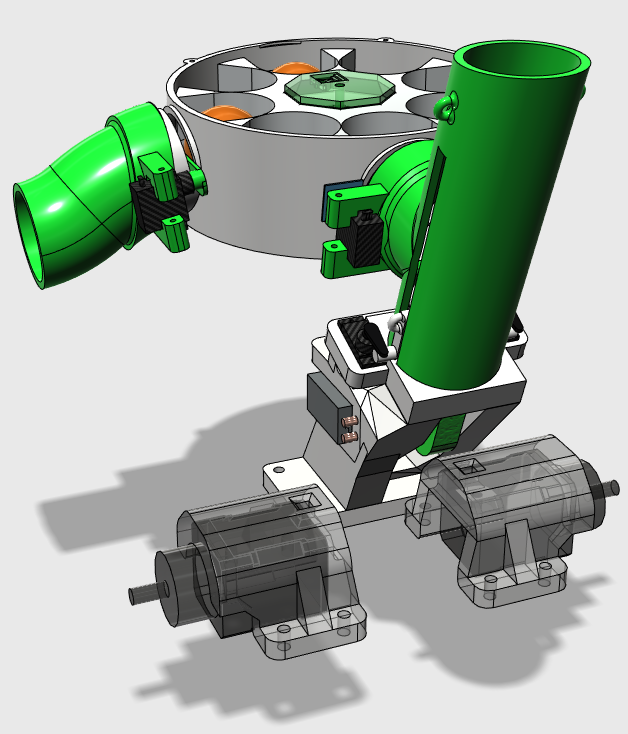

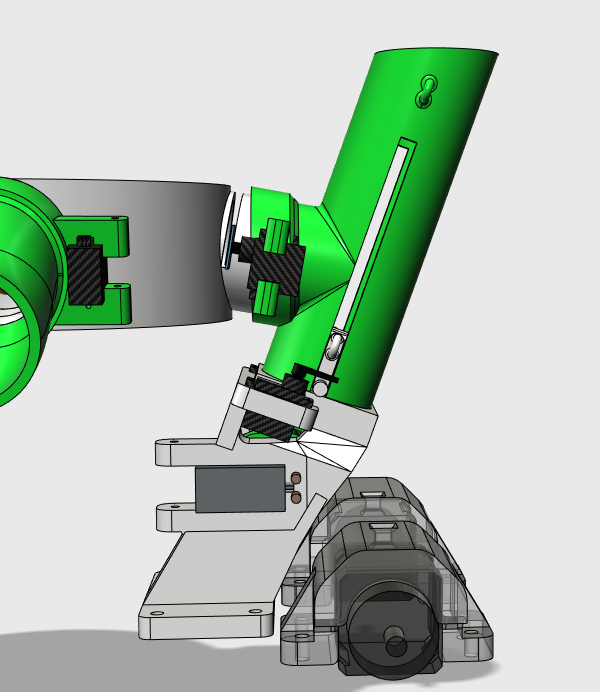
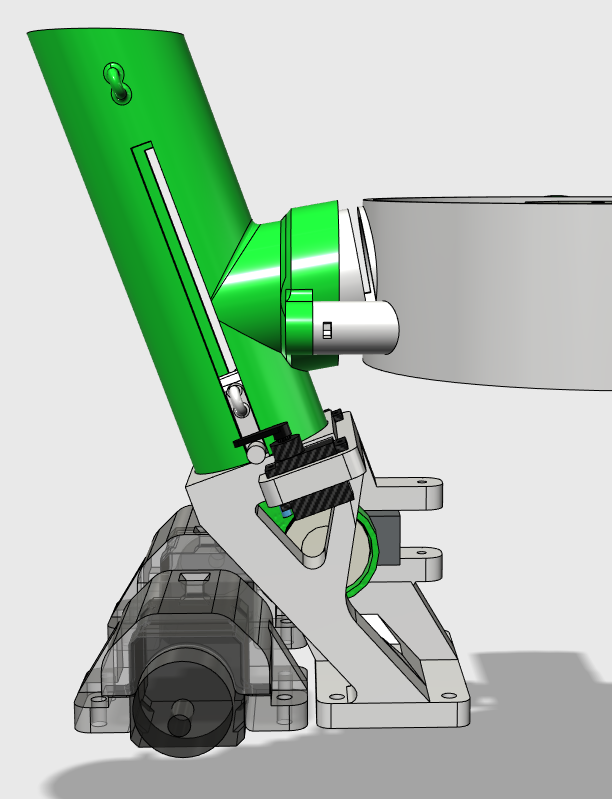
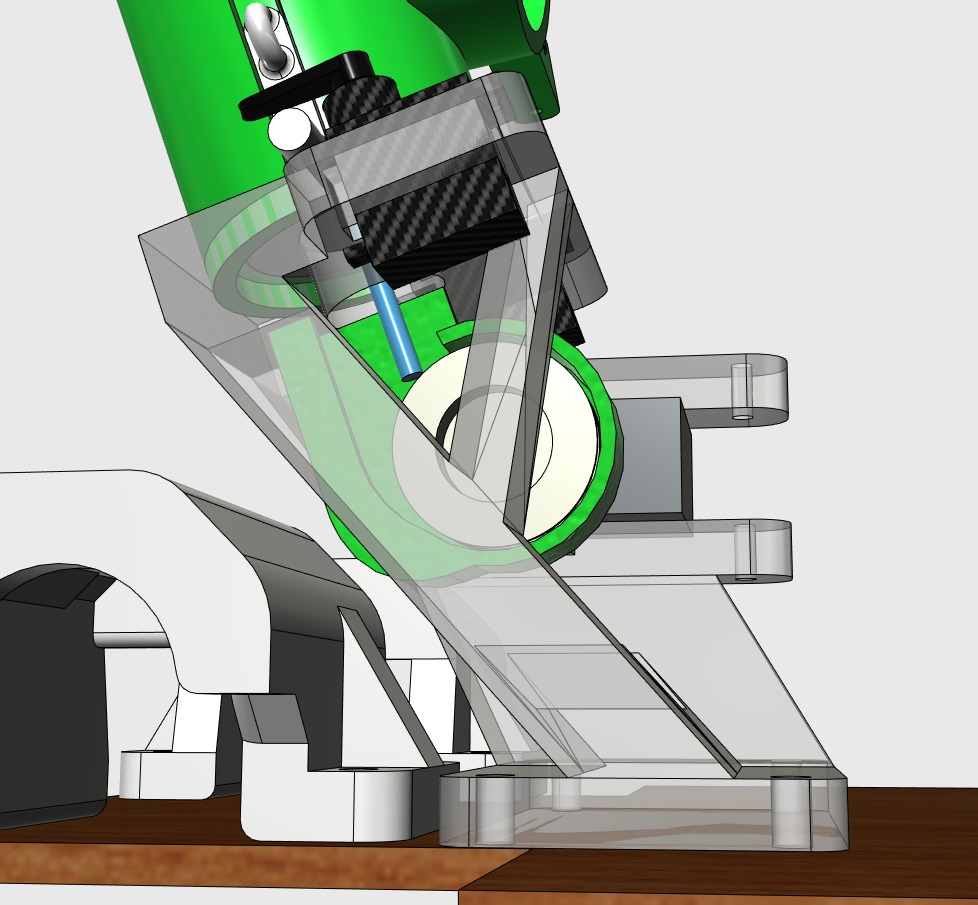
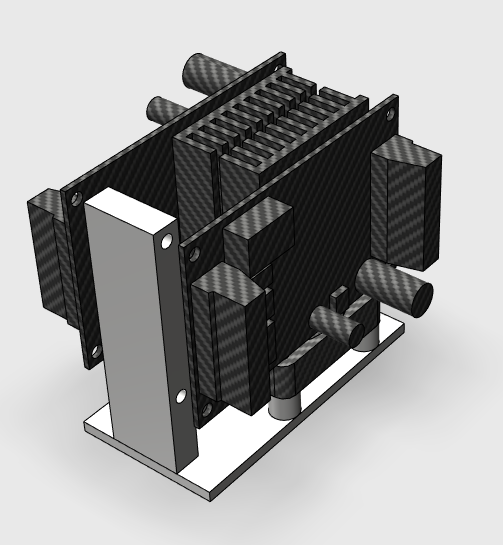
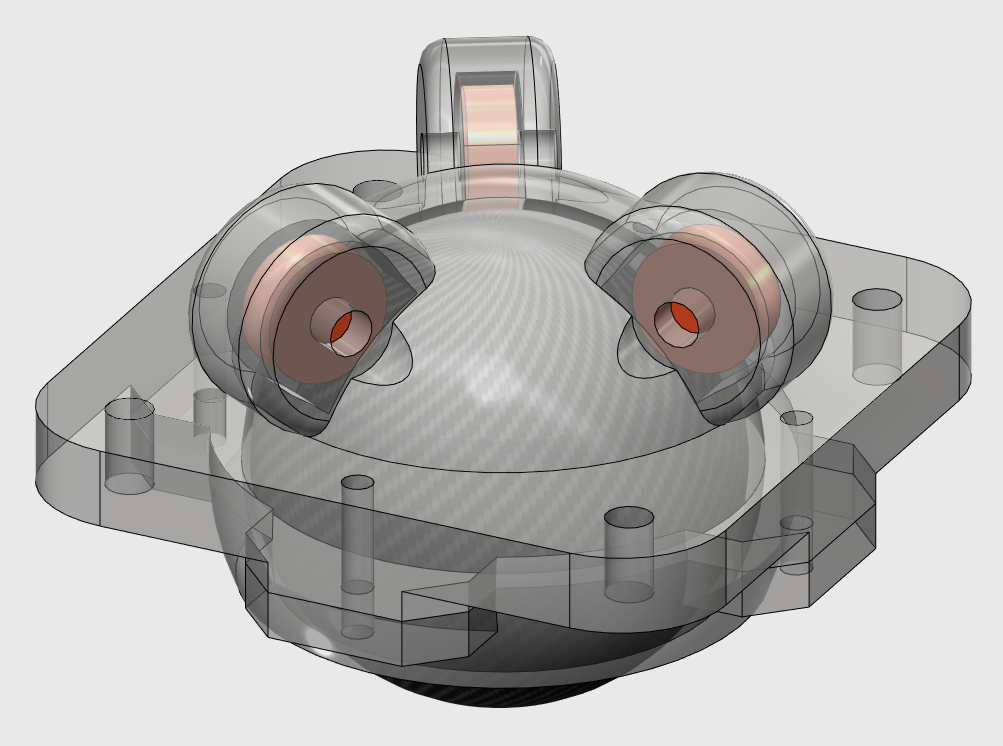

What do you think? Could this work out?