
In the last weeks we made a ton of progress:
Vacuum system
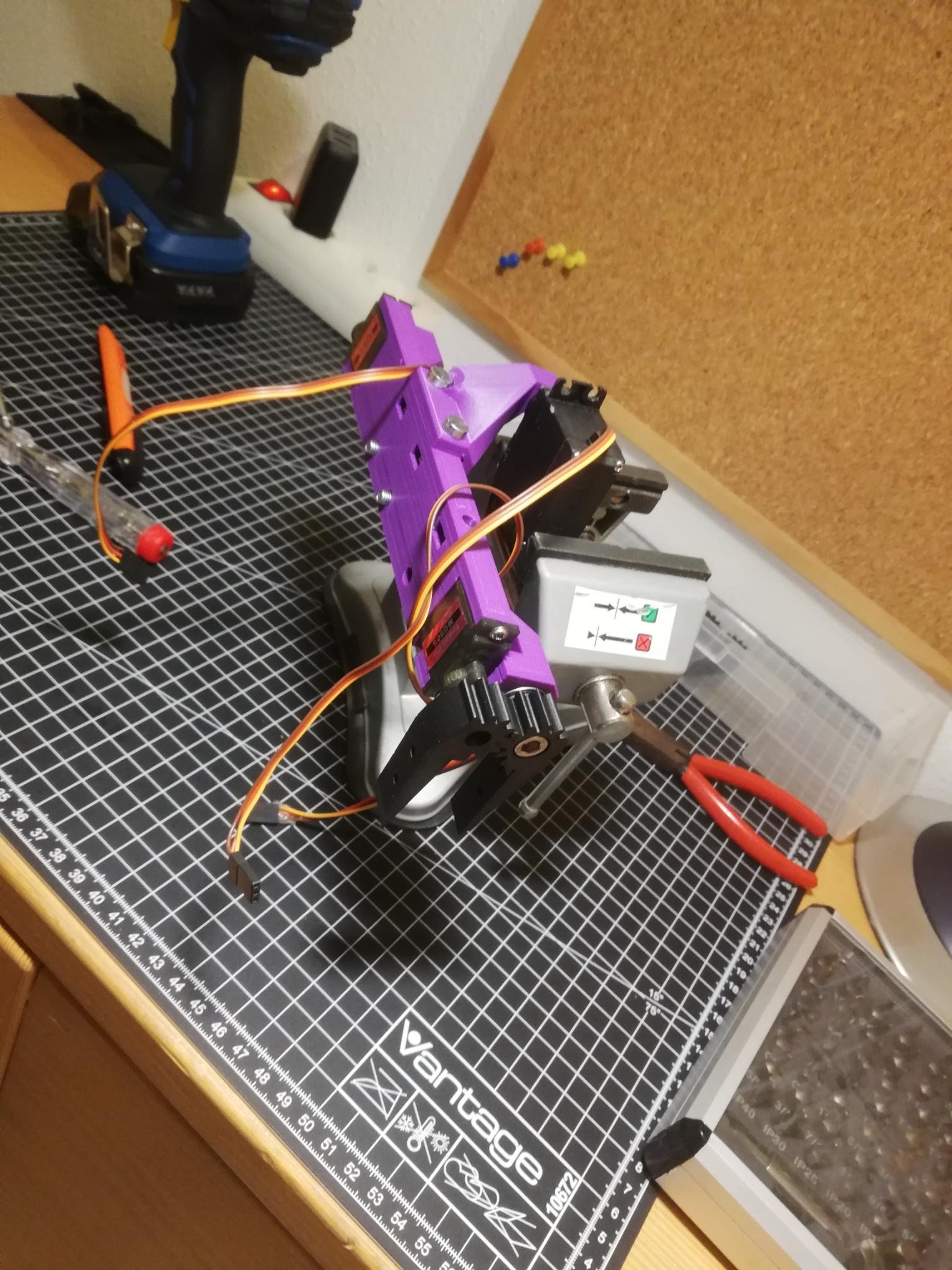
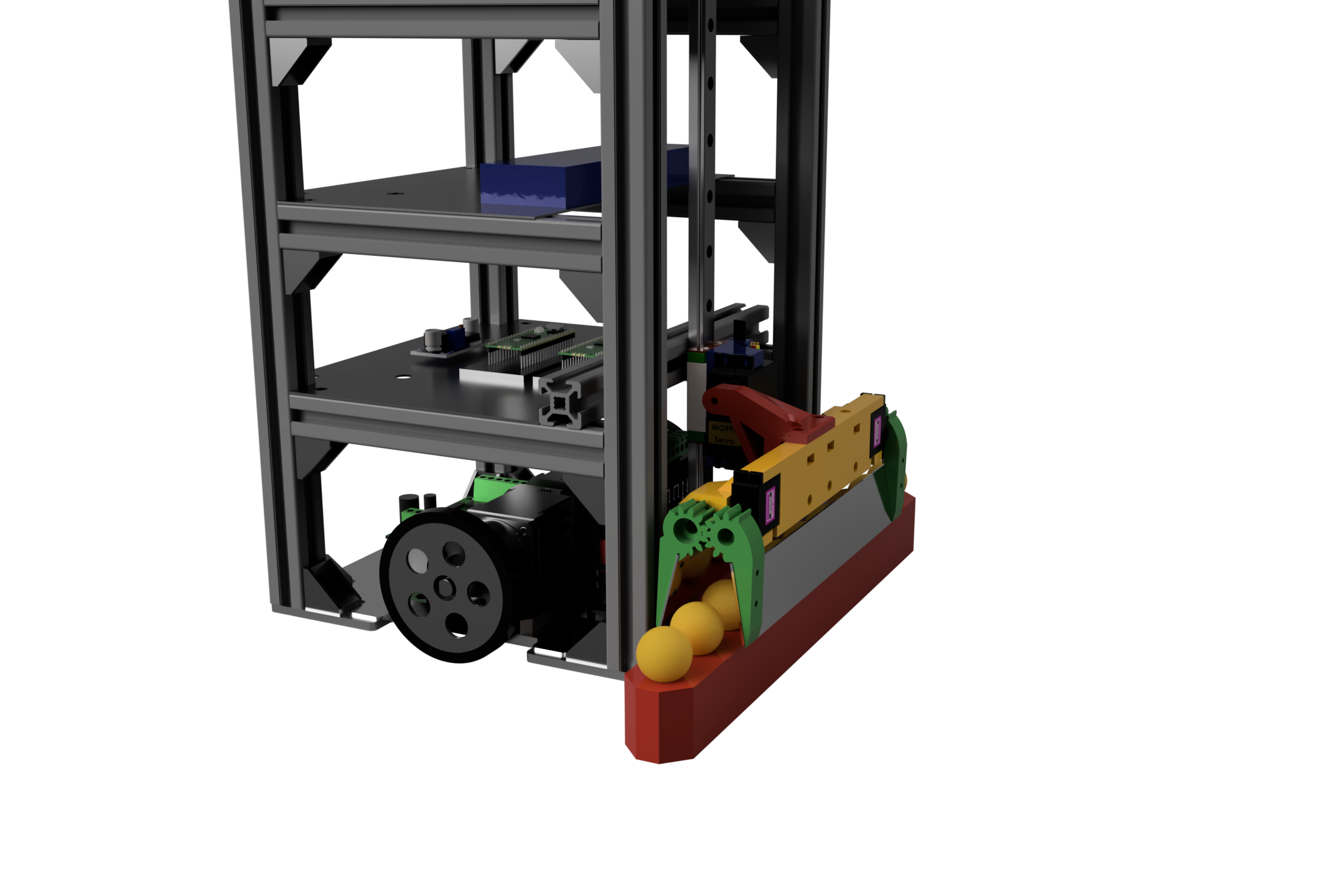
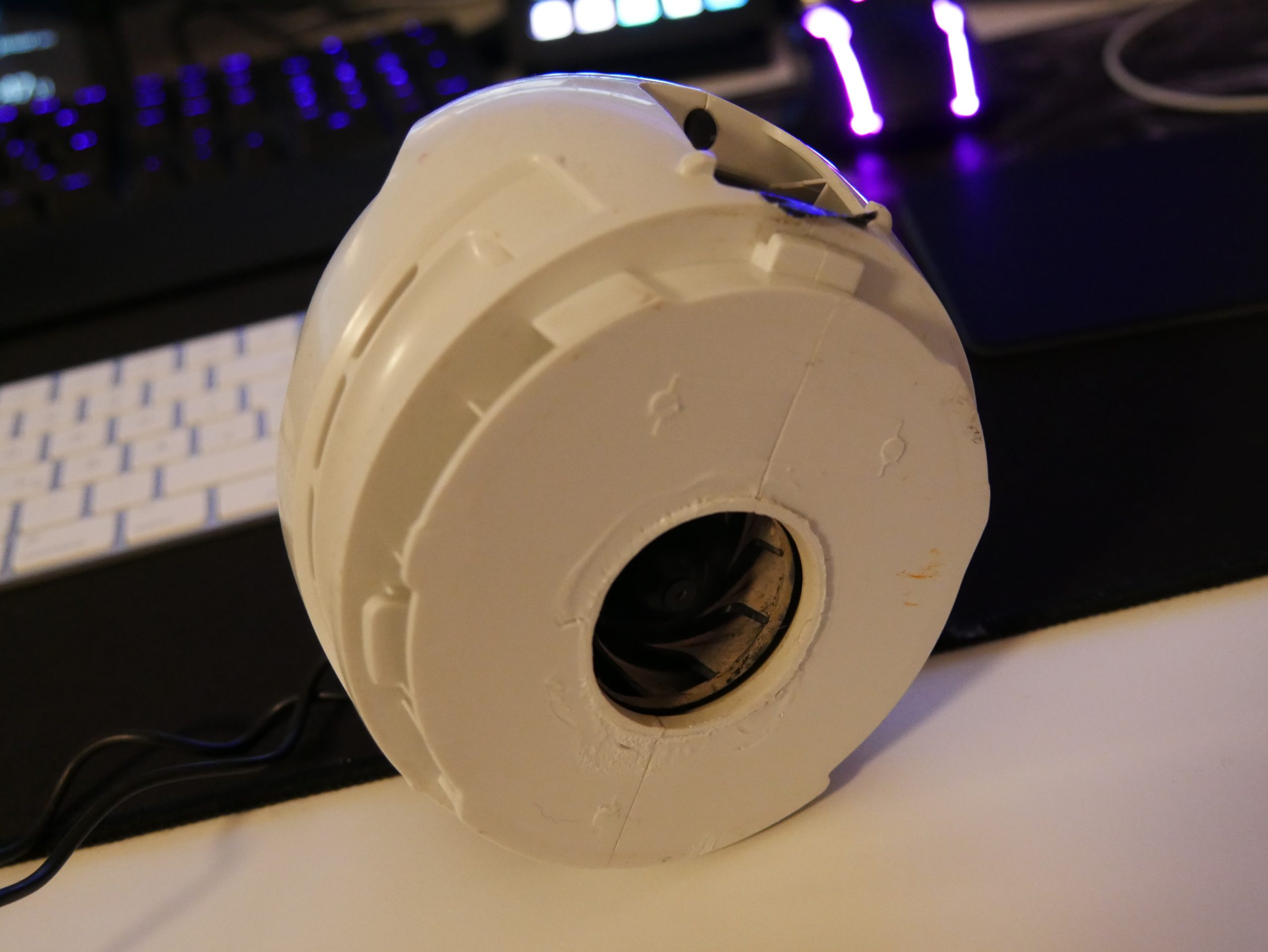
We found out, that our vacuum-system doesn´t work. We didn’t have enough thrust to suck enough air in, so we can´t put the balls into the bot. The problem was on our engine, which had too few resistance and so it burned a little bit, but we all are still fine. 😎 After that we searched for a new solution. We came up with a grapping-system, which will grab the balls, lift them in the air, and throw them into the basket. So, a team member of us built the gripper and now it’s already finished and ready to test. We also ordered a linear rail to create a vertical moving belt, which lists the gripper. We also needed some limit switches and an idler pulley.
While we are waiting for these parts to arrive, we are continuing on building our bot:
What we did
Next to the new idea of the grapping system we also invented a technology for counting our points or cherries in the basket. We wrote a display library which works great for counting our points.

We also disassembled our old bots and we got so many parts we can use like long 1 to 4 cables, 2 state levers, switches and displays. From these switches we also coded a team-selecting-library, so we can choose on what team we will participate before the match. We chose to put this switch on top of the bot which fits our needs really well.
A big problem of ours is the remaining time: Since we don’t have much time left and we still want to test our bot in the near future, we have to finish building it really fast: We finished planning in the 3d-model and also built our last layers. On the top we assembled a emergency-stop-button, the team select lever and we ‘ll assemble our pull cord, which will allow us to start the bot without touching it.
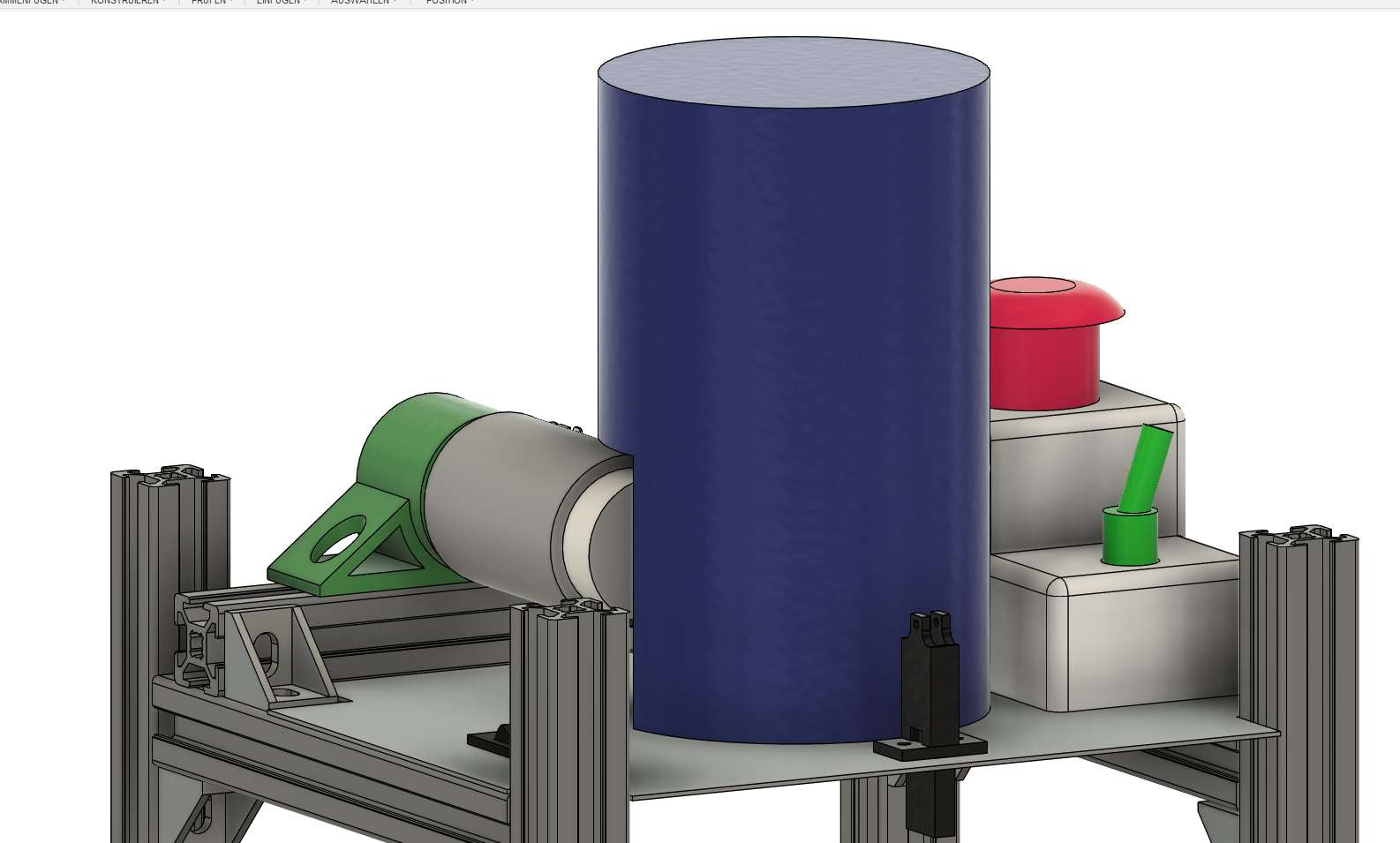
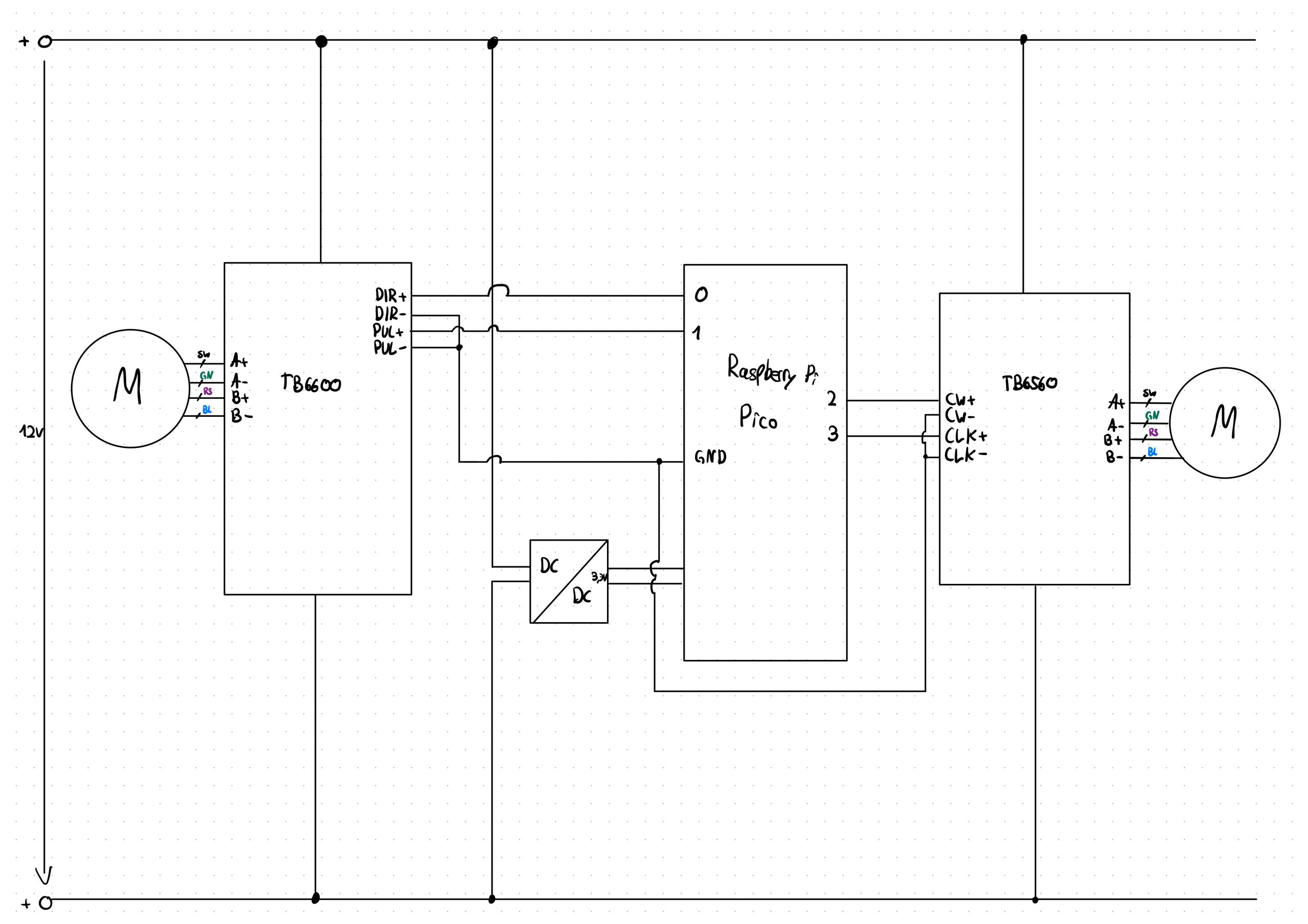
We also soldered our last parts and made plans about the walls, the wiring and created brackets for our parts, so that the bot looks really good and will be easy to manage. To help us find the right cables quickly, we also designed a circuit diagram, since we didn’t have a good one in the last couple years. We use this as a base for our wiring.
Our Ideas
Because the project deadline is in the near future, we also planned how we will participate using some tactic ideas: we got 3 versions of the tactic, to have a solution for each problem other bots will cause. Secondly, we planned how we will detect other robots using ultrasonic sensors. The only problem we get because of this is our grapping-system, which will cause the ultrasonic sensors to detect itself as another robot, but we have plans on how to fix this problem.
We’re also planning to use the line-detecting-sensors to make the bot be able to find its way through the playing area.
Our plans
At the moment we are building our bot, we already cut our aluminum-profiles and our layers. Now we are building our tower on top of the bot. Following we will assemble the linear rail for the gripper. Thereby we can move the gripper vertically. We will also wire the gripper to ensure we can test it as soon as possible. In general, we plan to test our bot as much as we can so we can cooperate well with the Big Bot. We are already structuring our code and our enemy-detection and continue that in the future.
(author: Christoph, Emanuel)