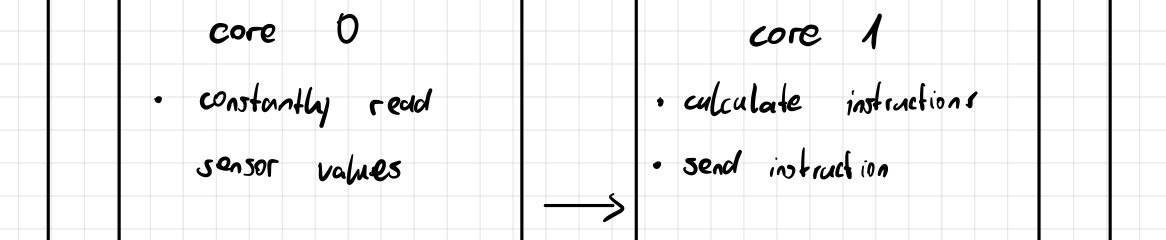
This week we thought about the communication and the tasks of our two Raspberry Pi Pico. Our idea is that one board we’re going to use for reading out our sensors, calculating what the motors need to do, and sending these instructions with some parameters to our second Pico, which then stores the instructions and parameters and executes them.
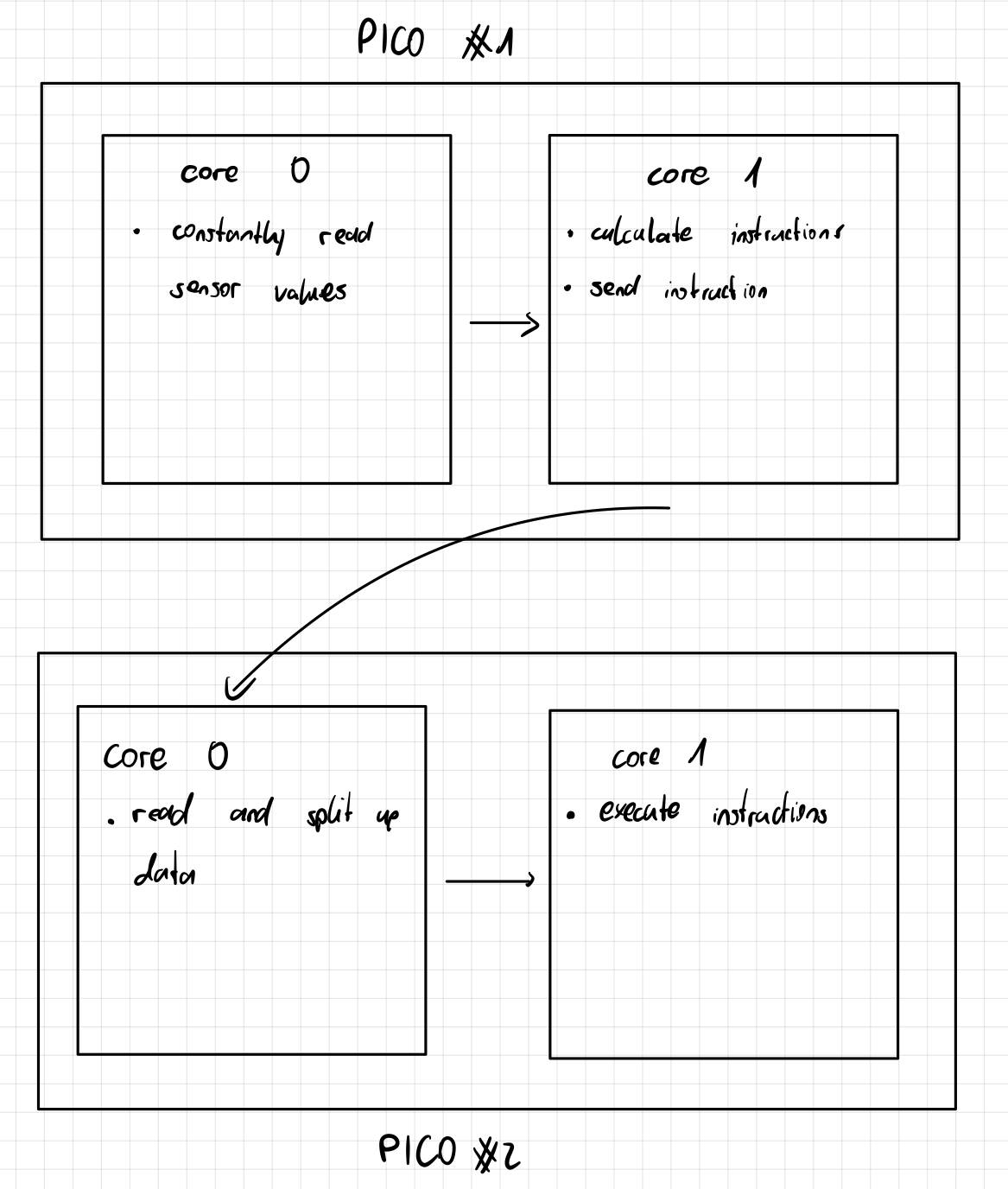
For communication, we’re using UART. We wrote a script for the second Pico which gets the serial data, splits it up and stores it in an array. In the next weeks, we’re going to test this further and plan how exactly we’re going to execute the instructions.

(author: Jannis)