Eurobot: Task Distribution and Serial Communication
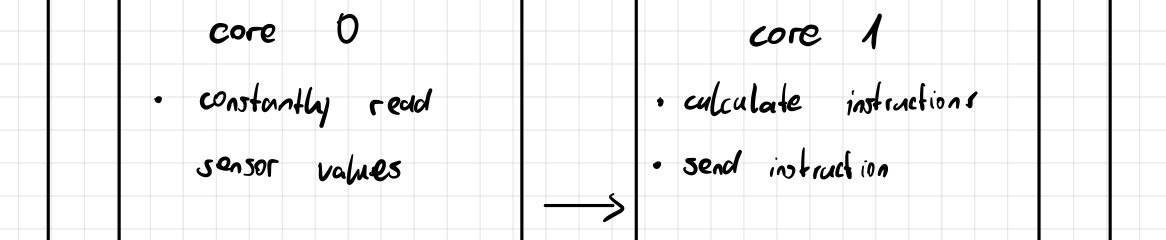
This week we thought about the communication and the tasks of our two Raspberry Pi Pico. Our idea is that one board we’re going to use for reading out our sensors, calculating what the motors need to do, and sending these instructions with some parameters to our second Pico, which … Weiterlesen …