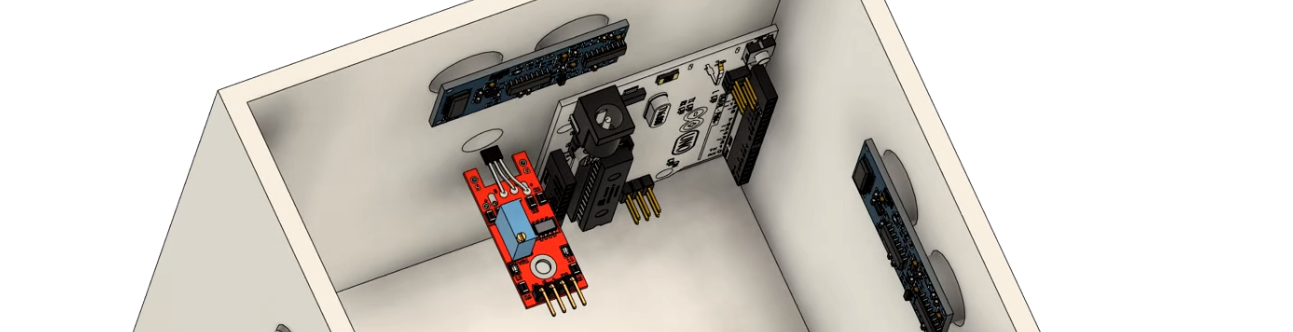
In the last two weeks we focused on tests about the floor and the magnet that’ll be used in the final maze. At first, we couldn’t connect the third infrared module because of a missing pin, but now we solved the problem by disconnecting a pin from the hall sensor we didn’t need.
Now, after setting up a first code to detect the lines, we noticed the bot not really driving in the middle of the way. So, we set up a new code, which equalizes the speed instead of driving in the opposite direction. For the next few weeks we planned a new case for the bot, so that we have more space for cables and electronic pieces, and we’re hoping to get the last few needed things done, like an LED or an emergency stop switch.
(author: Emanuel)