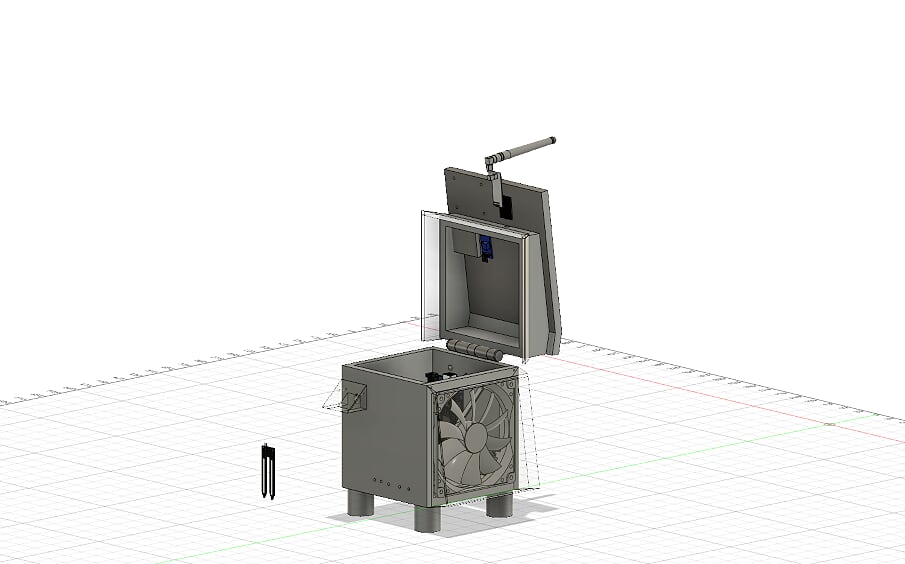
In order to start the whole process of designing SAM, we first had to agree on which sensors to use in the project and then we assigned different tasks to our team members. In order to design a model of the casing we used Fusion 360 by Autodesk. The programme allowed us to virtually depict the casing as well as to digitally change the sensors’ location in the casing. After having come up with a first draft of what it should look like, we ran into several problems, some of which were how to make it waterproof, how to protect it from bugs and other animals and last but not least which battery to use and how to power it efficiently.
To solve the problems we decided to build a quite solid casing out of wood and decided to power SAM through a solar panel and a lead acid battery as they are very enduring, a quality which we need in order to have SAM out in the world operating fine and collecting data.
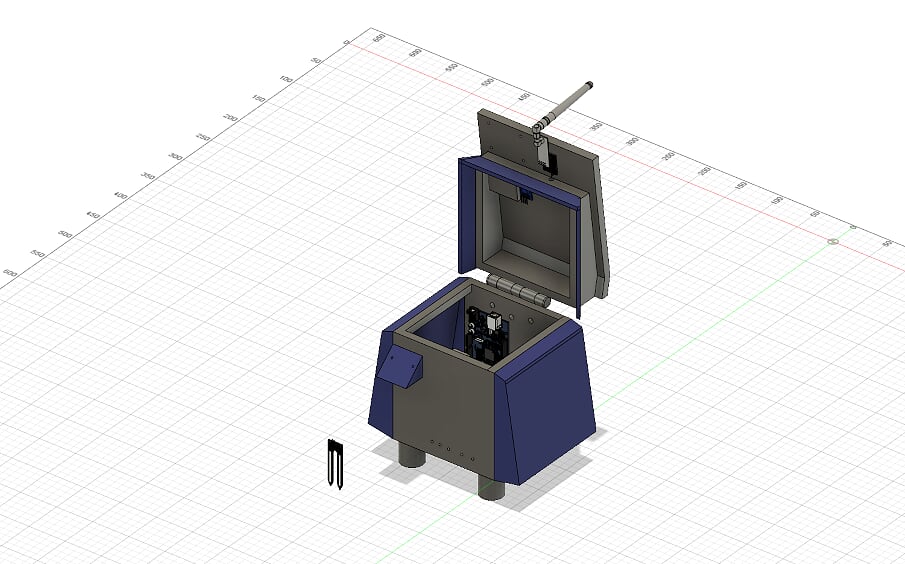
In total we had to go through a total of three different “generations” of modelling SAM until everything was working out just fine. And as you can see in the pictures a lot has changed from the first draft.
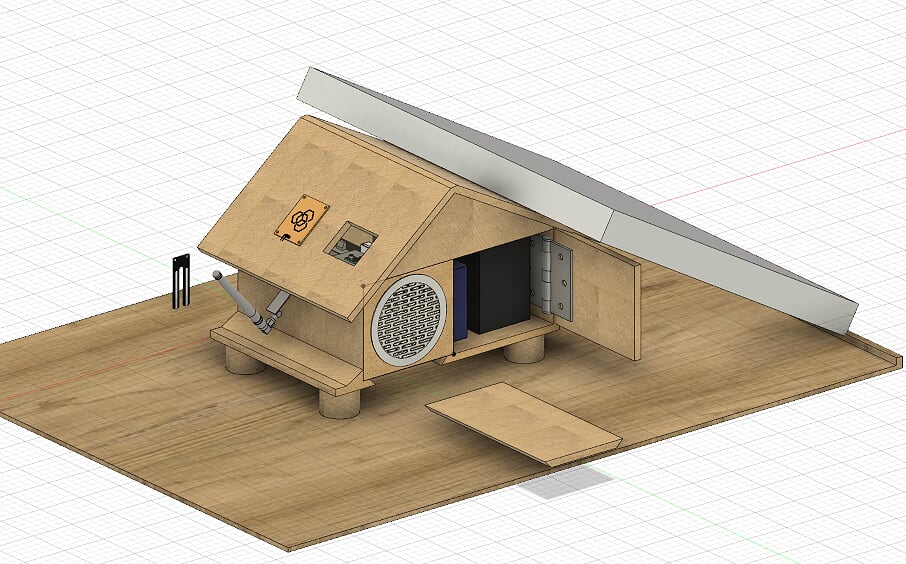

Now SAM is almost fully functional and we can’t wait to see it operate in the outside world.
(author: Mattis)