MAI Cup Junior: How does it work?
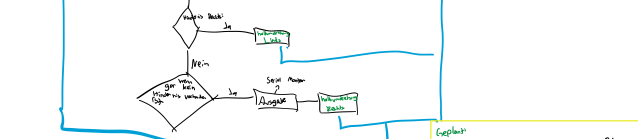
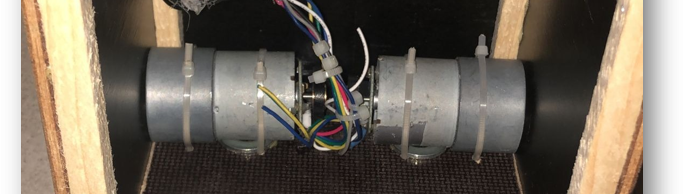
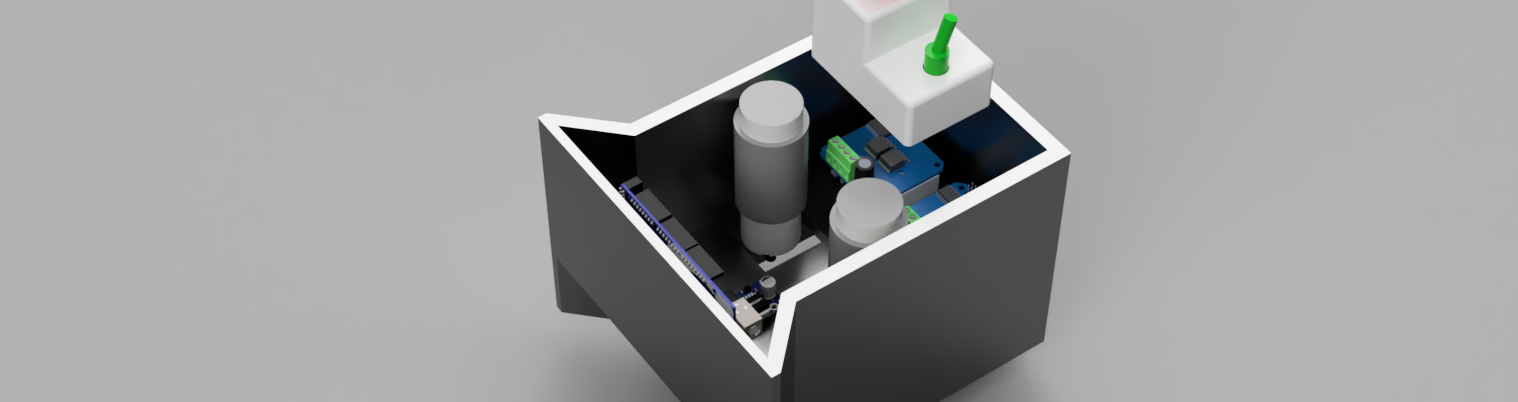
We want to give you a little insight into our work. Here you can see the cabling and the basic data flow of our robot. Take a look: We also did some additional test runs. There is still a lot of work to do: