MAI Cup: Tech Day in Markt Indersdorf
We held a tech dayfor the MAI Cup competition. All teams can prepare for the finals now.
Robotik-AG des Gymnasiums Markt Indersdorf
We held a tech dayfor the MAI Cup competition. All teams can prepare for the finals now.
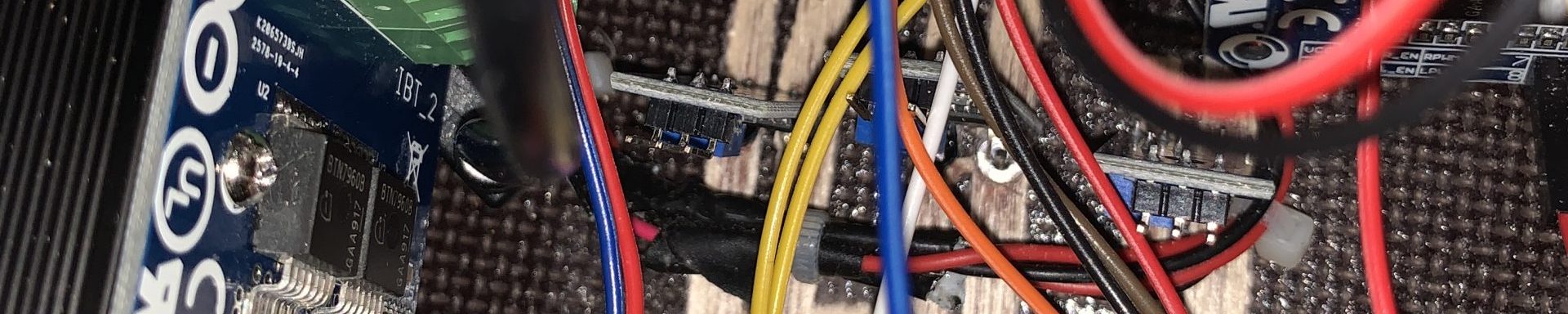
This week we measured the power the bot needs all-in-all. Sadly, this doesn’t even give us any kind of information because the motors take more power, for example, in the moment they start. Also we didn’t find any information about our motor types so we can’t look up how much … Weiterlesen …

This week we again tried to connect the port expander, but it didn’t work as expected. We’ll try solving this problem next week. But we successfully connected our 9V battery to the DC-DC, so we can now use one battery instead of two. This also allows us to easily connect … Weiterlesen …
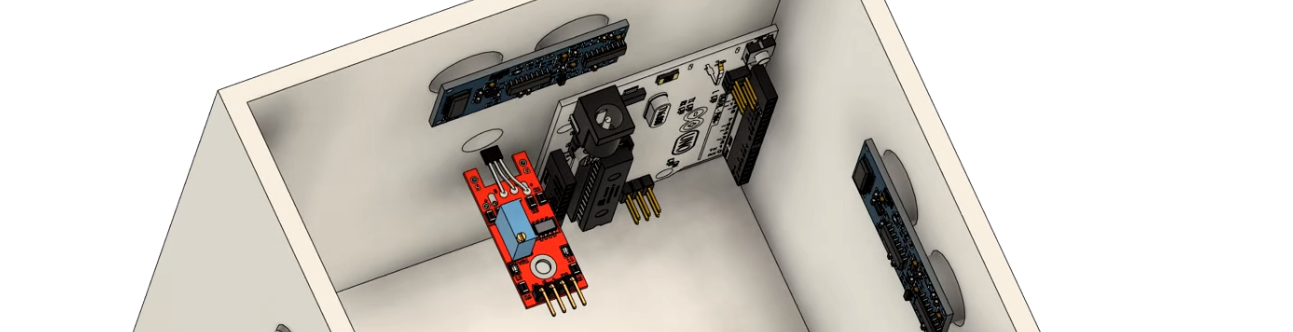
In the last two weeks we focused on tests about the floor and the magnet that’ll be used in the final maze. At first, we couldn’t connect the third infrared module because of a missing pin, but now we solved the problem by disconnecting a pin from the hall sensor … Weiterlesen …

This week we mainly planned our to-dos for friday. We’re planning lots of things like measuring the floor in the area the maze will be in, so that our sensors won’t think they’re a line, or testing how big the minimal distance the magnet that will be used for giving … Weiterlesen …
This week we focused on programming. So we had a close look at the bot: how the bot was following the lines, was turning right or left and was following the lines after turning right or left. We went on coding the bot. After uploading the code on the bot, … Weiterlesen …

This week we rebuilt the line sensors because they hadn`t worked properly. Finally, they do their job. We went on coding the bot. We coded more than 300 lines. The first code is almost finished. The bot can now drive through the maze. We are about to fit in the … Weiterlesen …
This week we managed to build in three colour sensors. With the help of those sensors, we can measure the intensity of the reflected light. The reflected light shows us the colour of the bottom of the maze. Those are the pieces of information we need so that our robot … Weiterlesen …

This week we managed to get the bot to follow a straight corridor. The code was reworked again. Now the bot can drive itself out of the maze. Take a look at our considerations: In order to make it a lot faster we had to buy a line sensor and … Weiterlesen …

Our robot is finally built. We now have an aluminium case, and the gear box is working like it is shown in the video. The only problem we encountered so far is that the centre of mass is not correctly placed so we must adjust it with some changes. In … Weiterlesen …