MAI Cup: Building a Basic Bot
We recently started building a basic casing for our bot, so we could actually build the final adjusted arm versions. We just took a wooden plate and mounted four wooden bars on it. We’ll later add a second stage on it, and carve out some holes for wheels, cables, arms, … Weiterlesen …

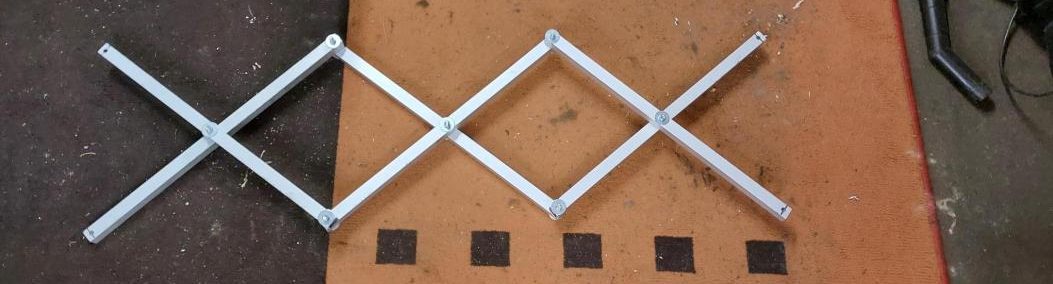
MAI Cup: Building of Deployable Arms
We recently constructed a deployable arm for our robot that is supposed to push tennis balls. It’s not yet adjusted to the bot’s dimensions and is only meant to improve the mechanism. The plan to make the arm extend with motors is to either use a rack and pinion or … Weiterlesen …
Eurobot: Sensor Filtering Algorithm

This week we wrote an algorithm for our ultrasonic sensors to remove some noise from the sensor. This is important because the sensors aren’t always quite accurate, so we must filter the values. In the algorithm, we have a variable “a” to adjust the graph. If we make “a” smaller … Weiterlesen …
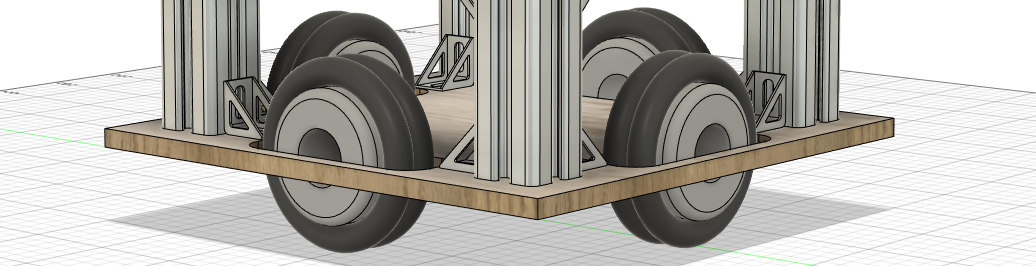
Eurobot: Small Bot Case Progress

In the past weeks we got our bottom plate. we can start building the first prototype of our bot: Additionally we completed the full aluminum case which we are going to install the hardware in: (author: Lucian)
MAI Cup: Strategy
Our overly simple strategy is to start each round by maintaining the minimum size of 50x50x50cm and then extending arms across the entire playing field. After waiting for the time to almost be over, we’ll move straight forward to push all the balls (including those shot over by the opponents) … Weiterlesen …
Student Robotics: Code Upgrade

We’ve made some attempts on some more complex lines of code: our virtual bot can now search and identify a specific marker and then drive in its direction. This will of course be crucial for our final code for simulator competition. In the video you can see the bot searching … Weiterlesen …
Student Robotics: Hardware and 3D Model Progress
We have upgraded our 3d-model and have also had some more thoughts on how we want our bot to look like. We want our robot to be made of two floors with the first floor containing our motors, our motor controllers, etc. and the second floor containing all the rest. … Weiterlesen …
Student Robotics: Simulator Problems Fixed
With the help of a blueshirt via Discord we were able to identify our problem with the simulator! A special thanks goes out to you, blueshirts! Since we can now finally start programming, we will test possible strategies and how efficient they are. The strategies may vary from our actual … Weiterlesen …