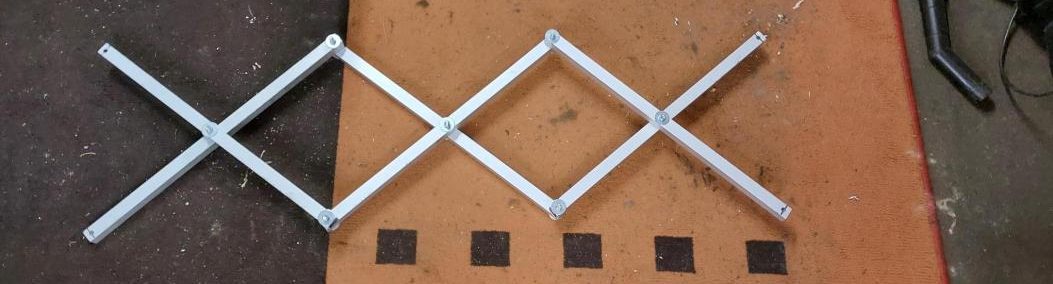
We recently constructed a deployable arm for our robot that is supposed to push tennis balls. It’s not yet adjusted to the bot’s dimensions and is only meant to improve the mechanism. The plan to make the arm extend with motors is to either use a rack and pinion or a small retractable coil to pull the two back ends of the arm together.

(author: Jonas)