
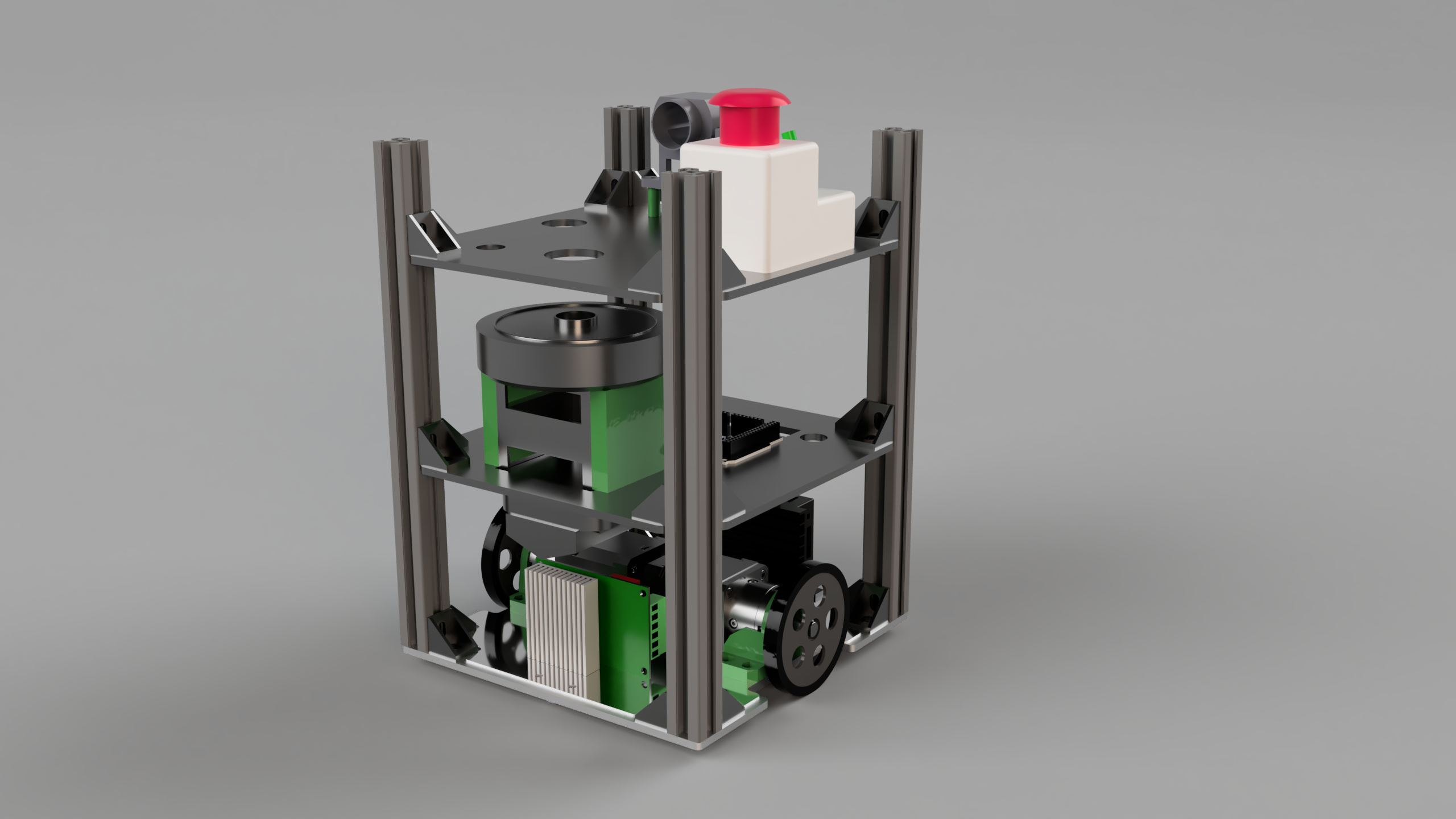
In the last productive week we finally finished our first 3D-model of the small bot, and we’re really confident that our plans could work out. In this design, there’s already the vacuum cleaner in it, a color sensor for following the lines, ultrasonic sensors, which will be in the walls later on and our first idea of the valve, which will hold the cherries, until we want to dispose them using a servo motor.
We also had first ideas of building the basket for the remaining cherries, and we ordered a scale, so we can count them.
Because the wheels we wanted to use had a too long neck, we drilled it, so the wheels fit perfectly onto our motors.

Another thing we finished this week is a test-model of our bot, which contains the stepper-motors, the motor drivers, a fuse and last but not least, an Arduino Uno. This test-model can now drive and we can specify a distance in centimeters or a value of degrees the bot has to drive. Surprisingly, this works really accurate.
Next up, we tested our servo motors, we’ll use mainly in the big-bot for dispensing the cherries and in our bot to dispense the cherries into the basket. This also works really good and using our code we can tell the motor how far to turn really accurate.
(author: Emanuel)