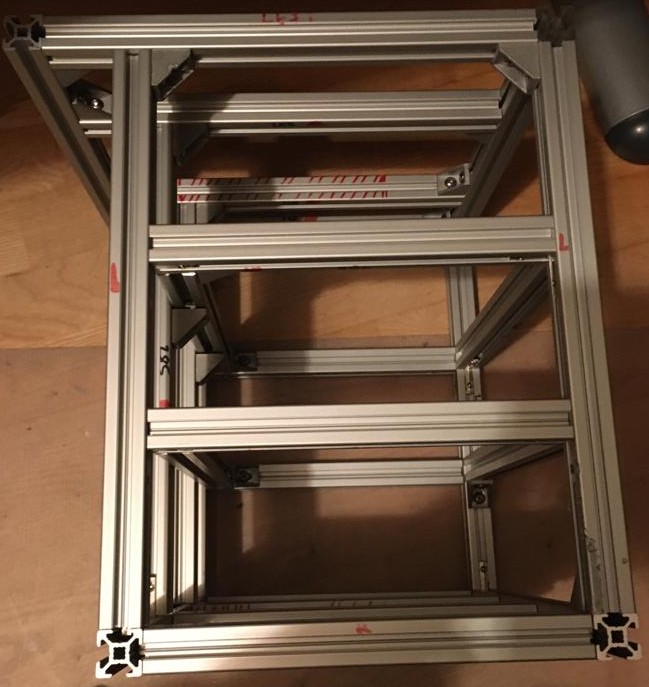
After a lot of pressure at school, we continued working on the hardware of the big bot this week. The idea of using a frame of 2020 extrusions, which is composed of several layers, is similar to last year’s. The heavy motors are located in the first layer in order to have a low center of gravity. The second layer is used for sensor control and local triggering of systems. In the third layer you can find an Intel NUC and PSEye cameras. Finally, the position on the top is for the RPLidar. Up to now the the 2020 extrusions got assembled as planed so that we can start plugging the rest of the hardware next week.
(author: Tjorben)