At first I have to apologize for a mistake in last week´s report. Of course we are using 5 servos, powered with 7V and not the other way around.
This week the metal for the big bot arrive and we are now able to build it.
We also did some hardware testing and got new sensors for distance measuring.
Coming to the experiment we sharpened our plans a bit. Since the experiment has to show firstly some kind of reaction, like the homeautomationpanel last year, we want to build this part similar to last year and the bot is going to activate by radiocommunication. It also has to hold the cord, which we want to pinch between two layers of wood and screw it down.
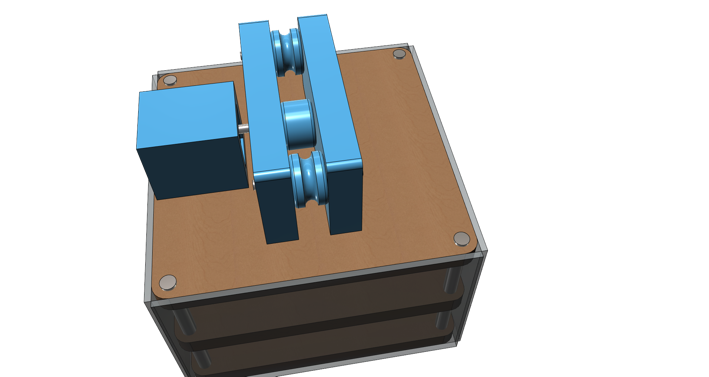
The electron is ought to be transported to the oxygen by the cord, where it has to be velcroid to. We develop a system with tree rolls, trough which is the cord pulled. The roll in the middle is powered by a motor and should have a very high friction with the cord. The communication with the electron happens also with radiocommunication.
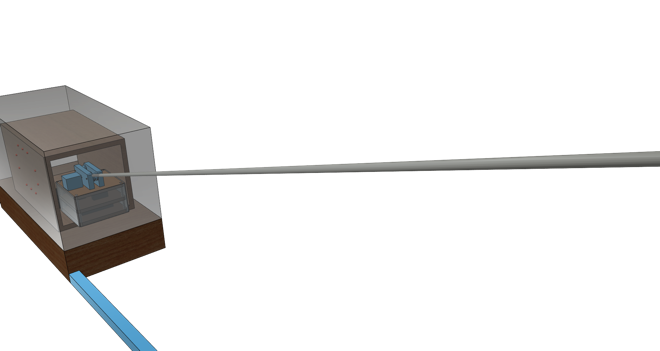
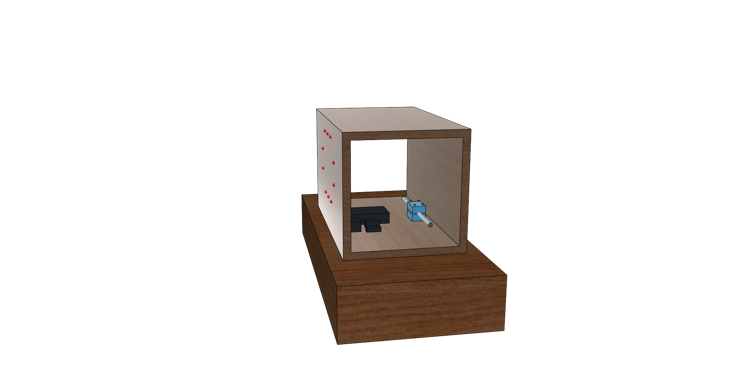
The black parts are hardware components and the grey surrounding are the maximal dimensions. The blue thing is the electron.
(author: Leonie)