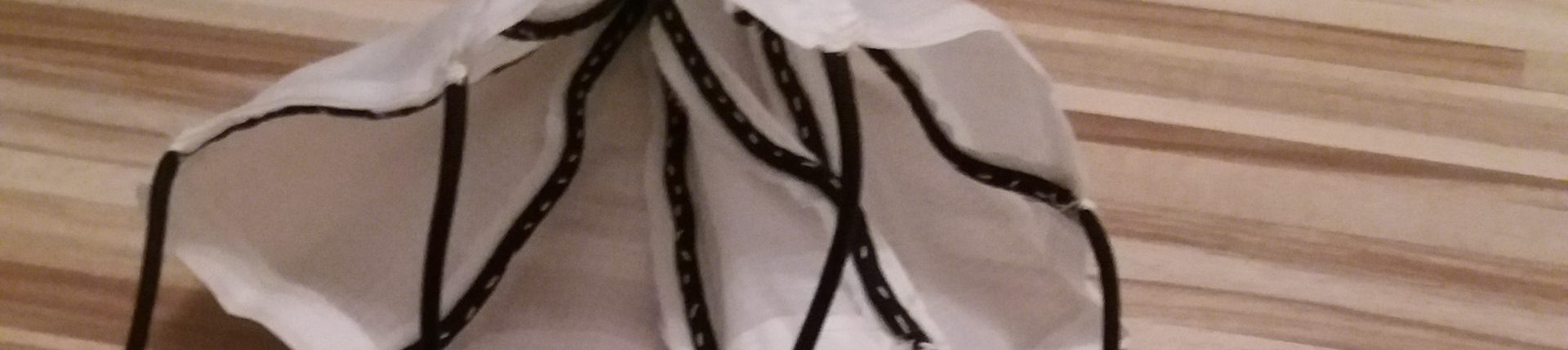
CanSat: A New Parachute

We finished the parachute: we used the new fabric band and adjusted the cords. We also improved our folding technique. We tested the parachute by throwing it off the school roof with a prototype of our CanSat. Take a look: We are proud to say: After our devastating first test… … Weiterlesen …