Are we on the right track? Can we make it simpler?
These are just examples of important questions we repetitively ask ourselves by turning plans to reality.
To get answers we compare our progress to our goals, after every step we did. And we adapt the manufactured to what we exactly wanted and next goals to what we really need. So take a look:
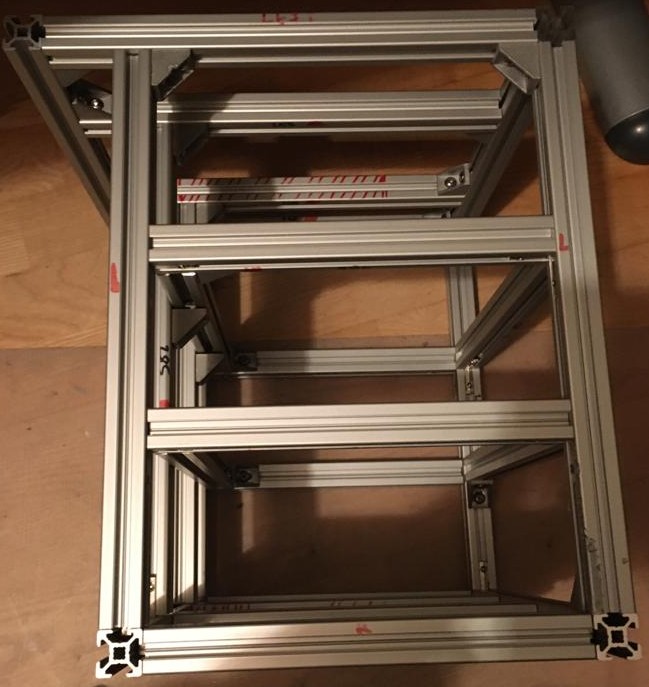
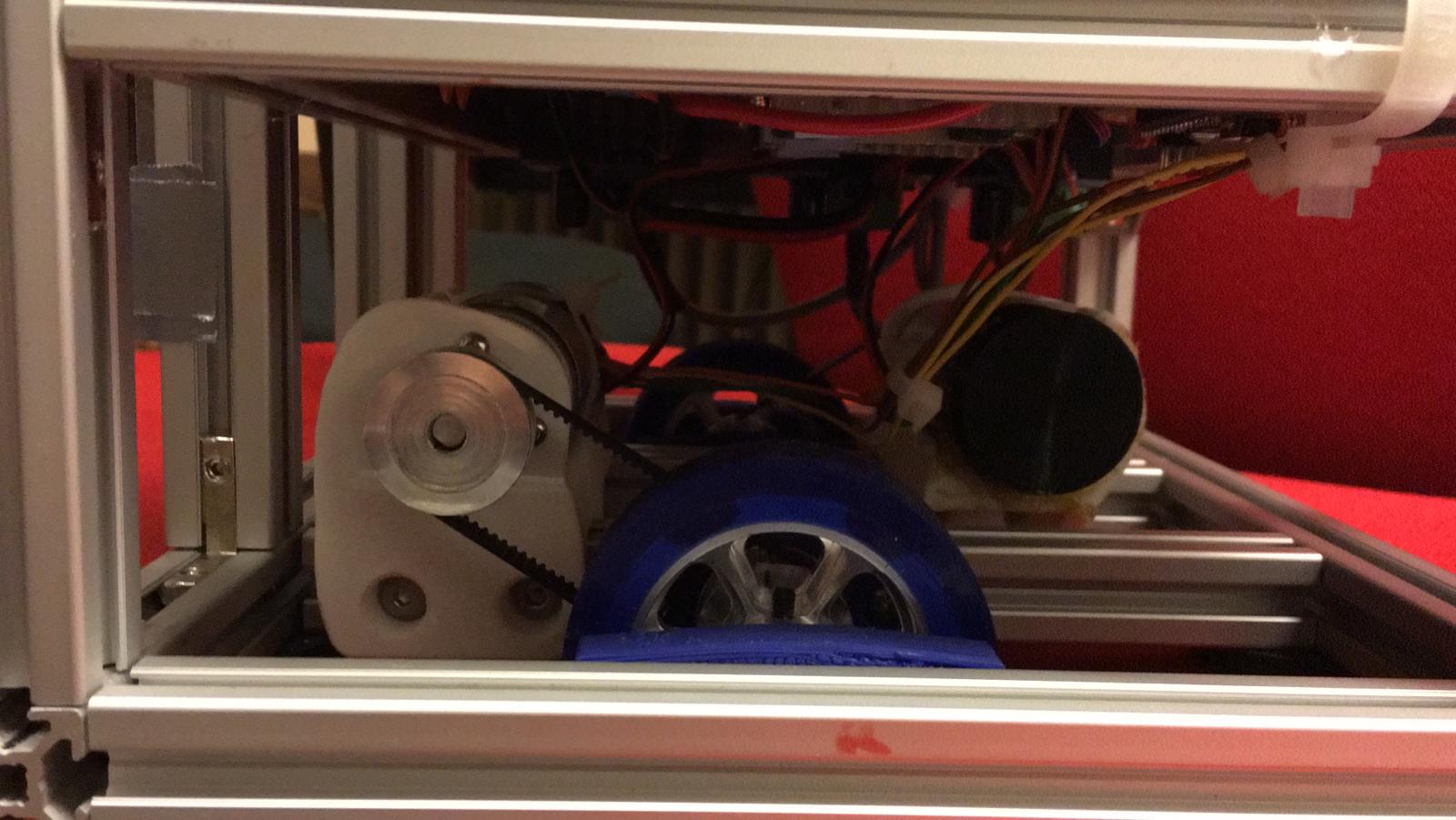
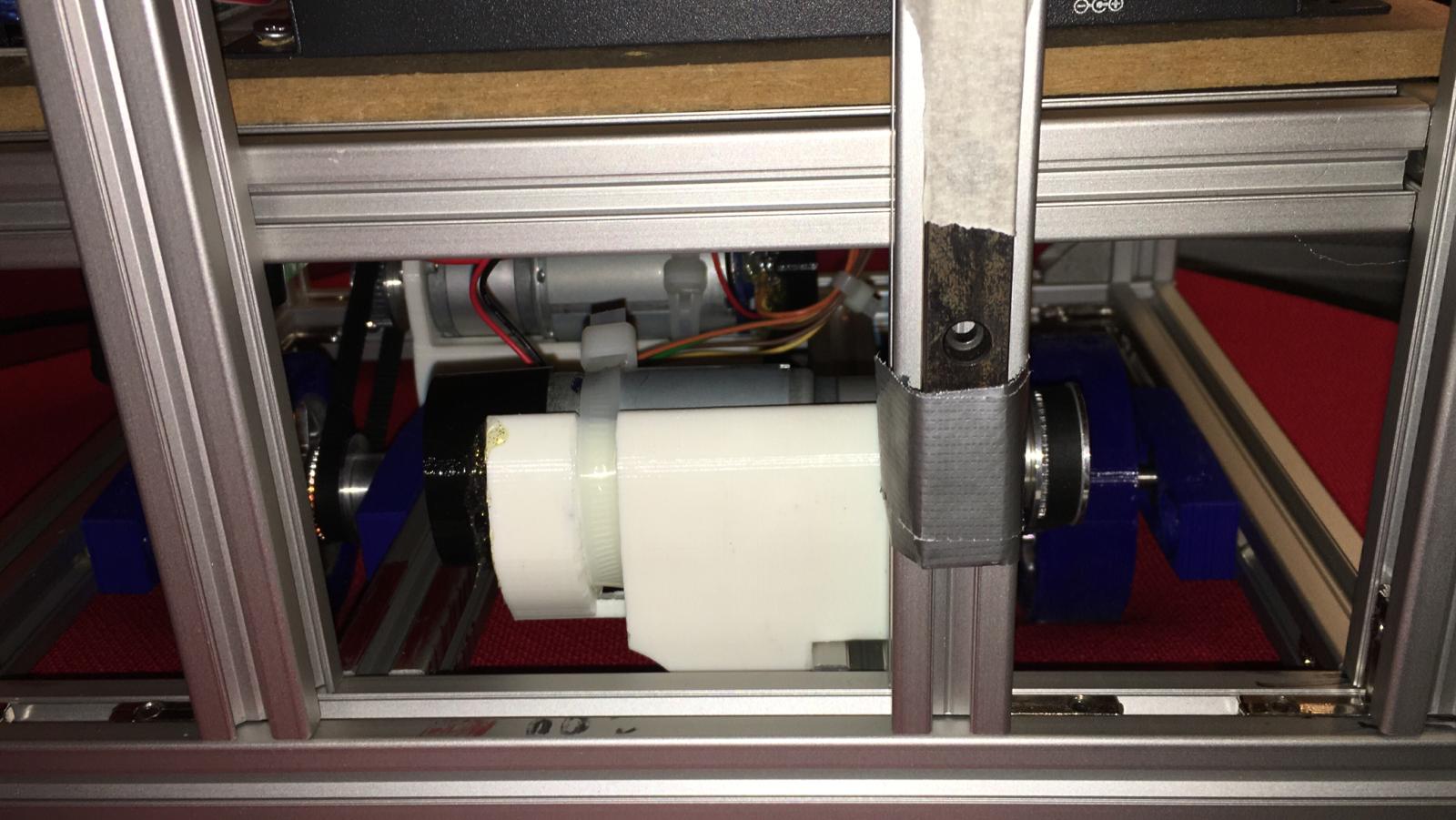
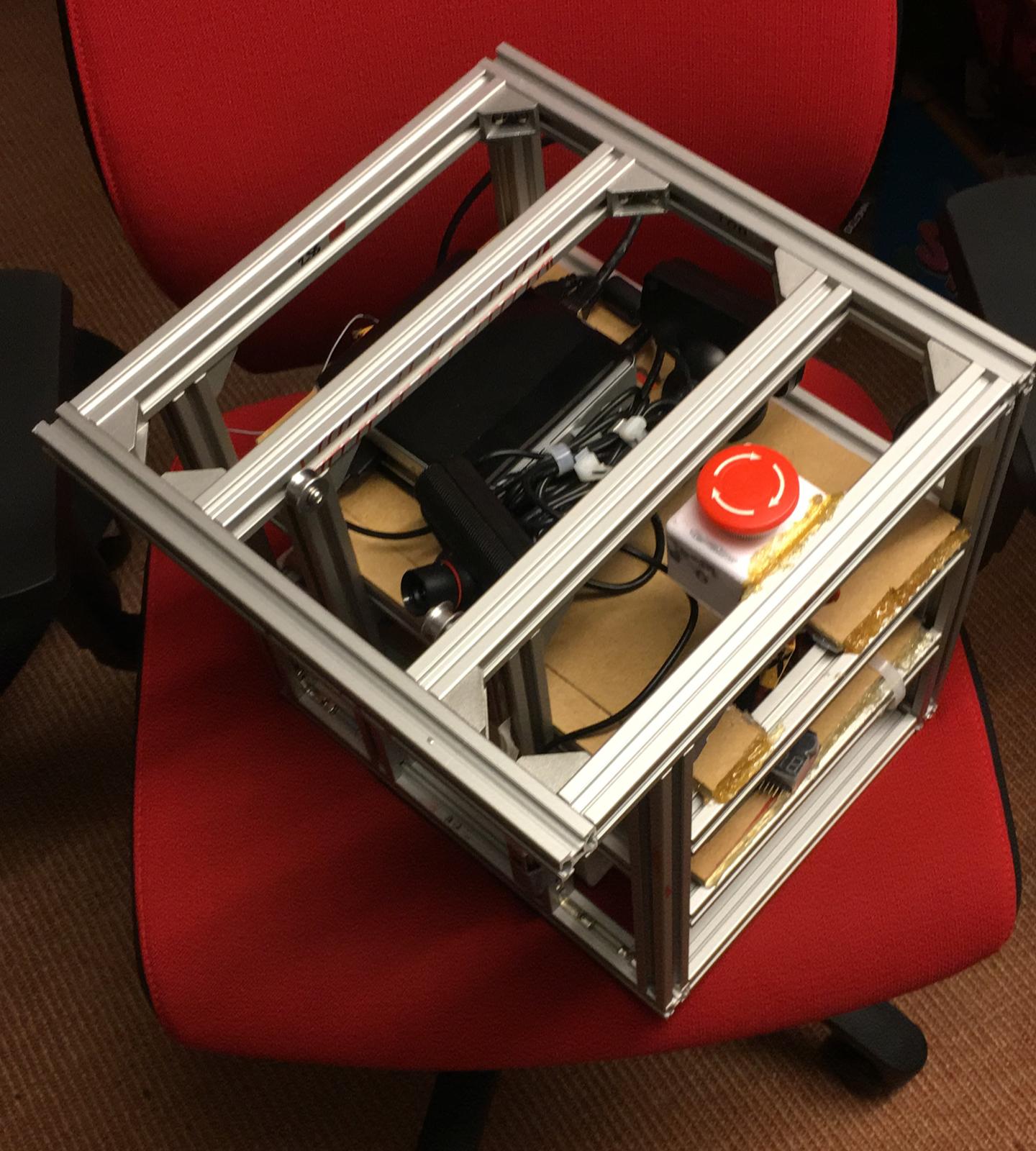
Big Robot
After the extrusions got bolted together into a stable frame, we integrated essential parts of the hardware. For example we placed the wheel motor system in the bottom layer and the control system in upper layers. Our latest progress is the addition of the RPLIDAR. Next steps are going to connect the rest of the wiring.
Take a look at the progress of the past month:





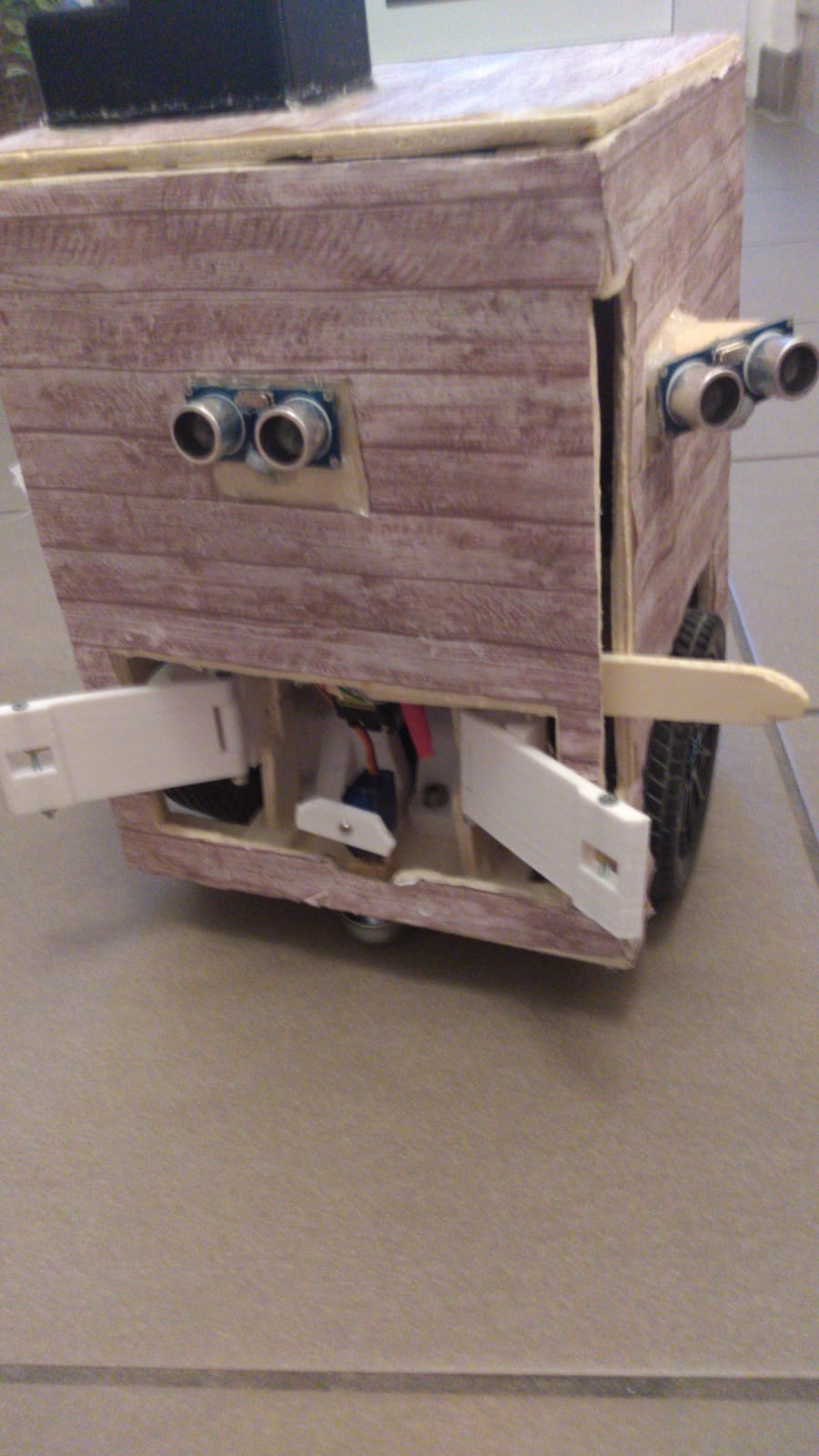
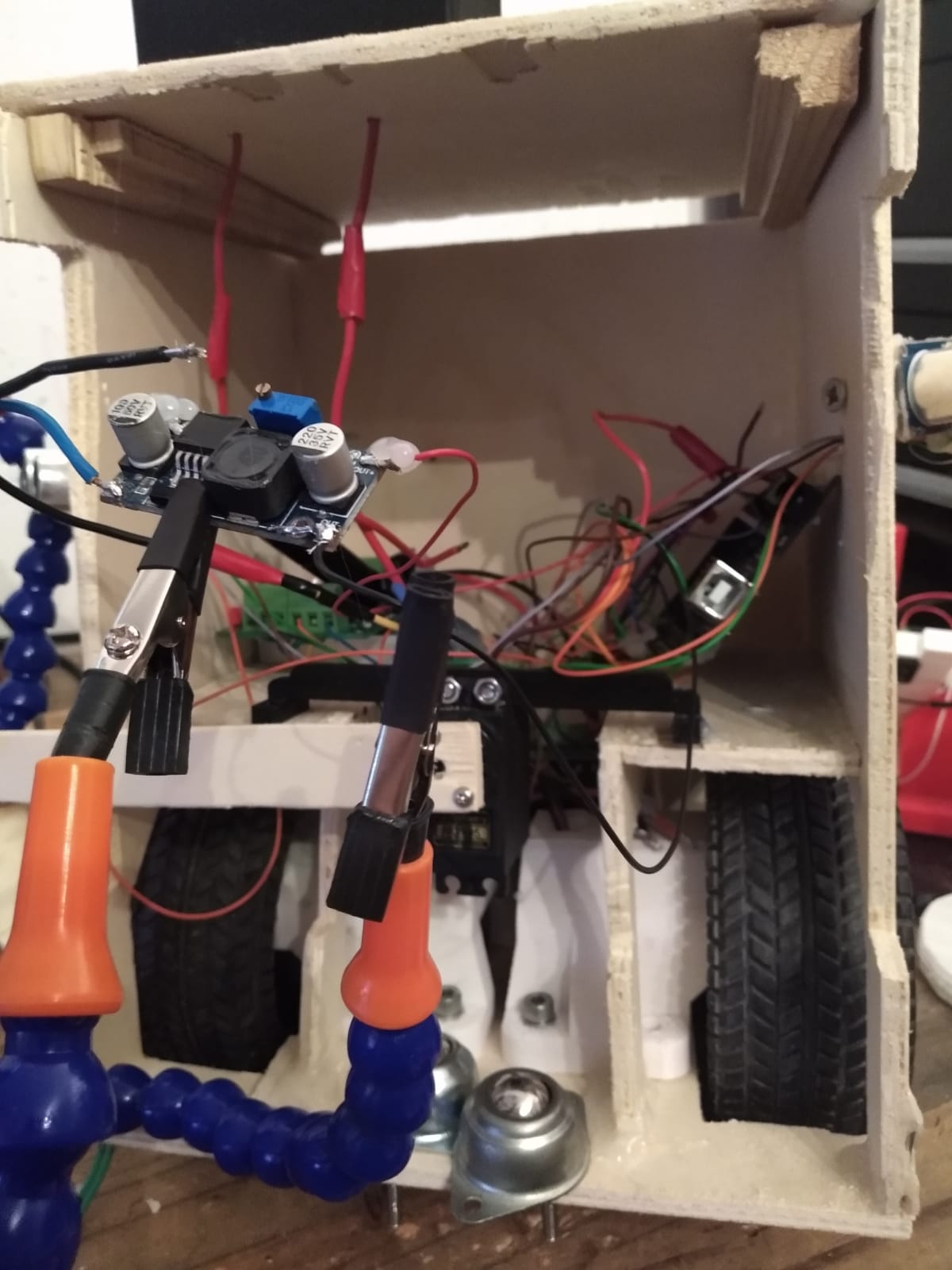
Small Robot
Last holiday our hardware design turned into reality. So we were able to test some of the arena attributes and how they can interact with the bots. After already having a rudimentary feeling for these dimensions from 3D models, it was good to get a confirmation of our presupposition now. And also a feedback for those plans that would not work, which is also important for software engineering. As well we still want to optimize a few thinks like the length of the extending arm.

(author: Tjorben)