MAI Cup Junior: Detecting the Walls

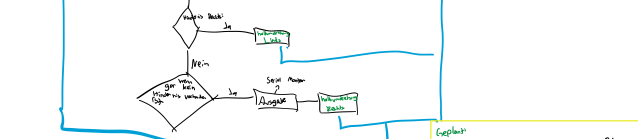
This week we managed to get the bot to follow a straight corridor. The code was reworked again. Now the bot can drive itself out of the maze. Take a look at our considerations: In order to make it a lot faster we had to buy a line sensor and … Weiterlesen …