
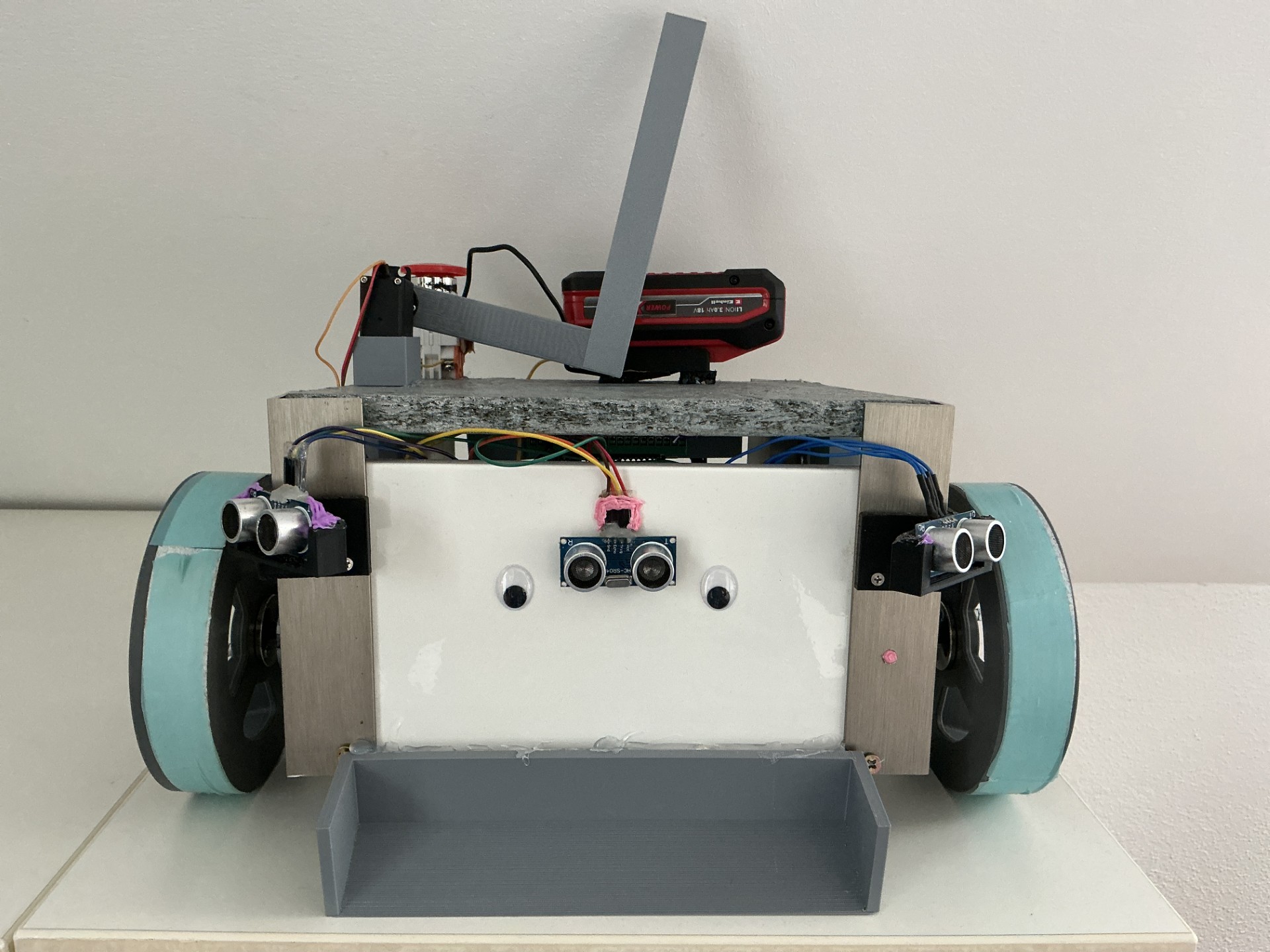
Over the past few weeks, we have installed four additional ultrasonic sensors at the back and on the sides. We mounted them on the top board using 3D-printed brackets. We soldered them together as much as possible and connected them to the Arduino Uno. We also programmed them so that if they detect an opponent at a distance of up to 30 cm, the bot stops.
We also attached a servo motor to the top plate using 3D-printed brackets. It is used to move the cursor with a gripping arm. We connected it to the Pico. At the front, we additionally mounted a 3D-printed slider that is intended to move the Jenga blocks.
(author: Samuel)