
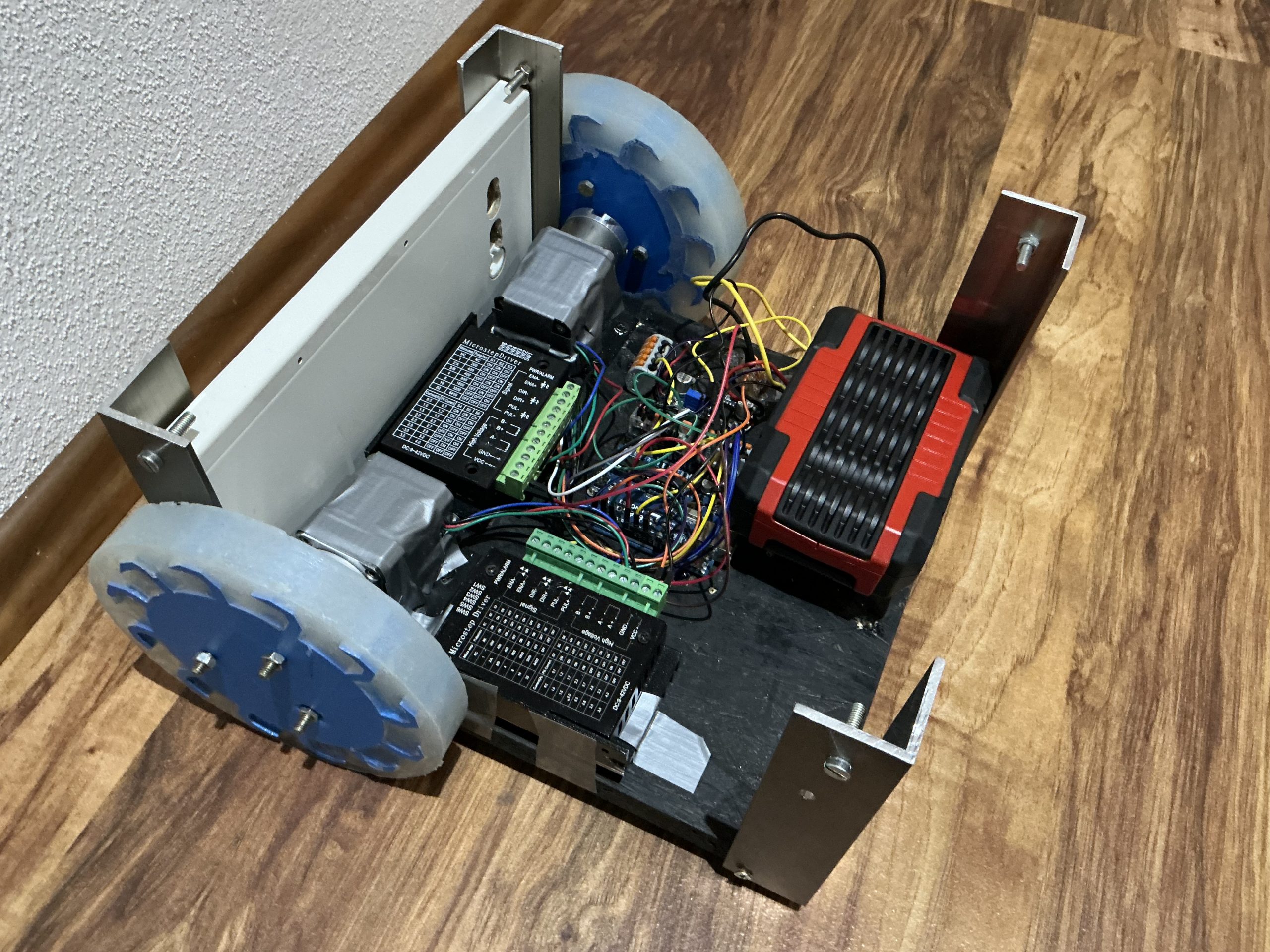
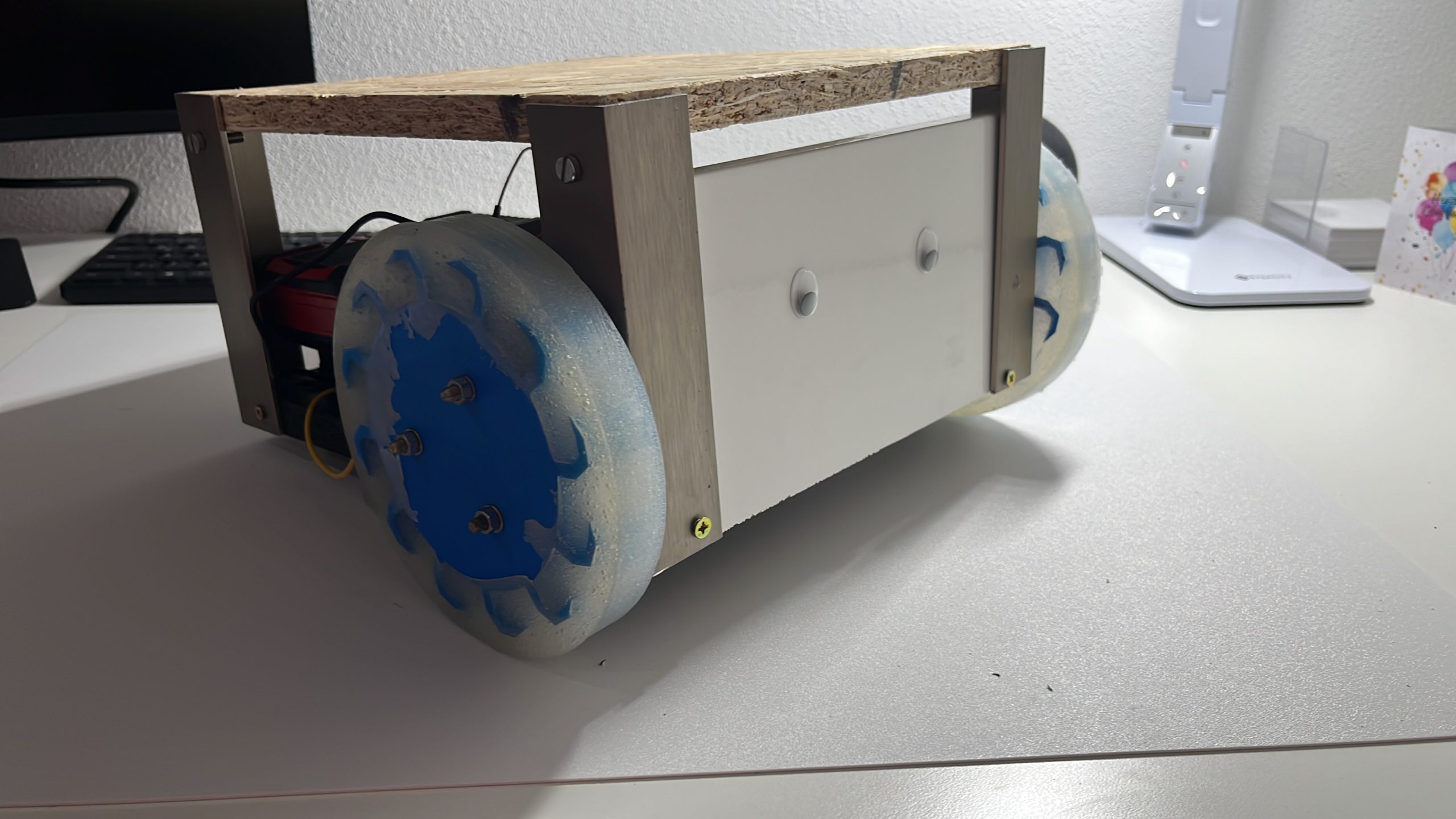
One of our problems was mounting the motors on the underside of the board. During the week, we moved them to the top of the plate and rearranged the entire setup a bit. On the underside, we screwed two small ball casters to the back, which now serve as support wheels. We also built a second level. First, we cut steel brackets to size and drilled holes in the appropriate places. We attached them to the base plate at all four corners of the robot and screwed bolts with nuts onto the top. We then cut the upper board to the appropriate length so that it rests on the bolts and can be easily removed. Additionally, we attached the first piece of paneling at the front.

(author: Samuel)